|
|
Категория:
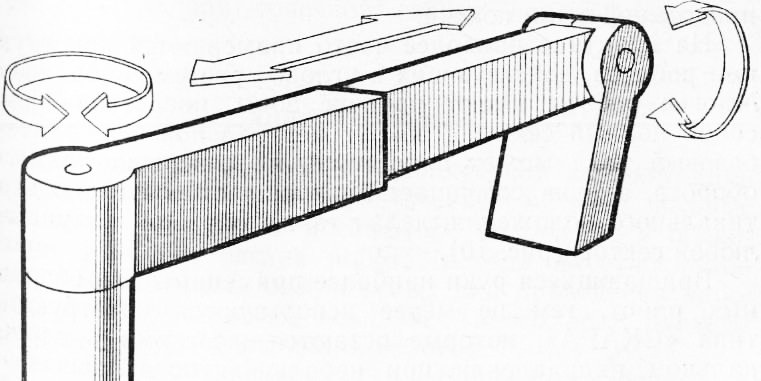
Роботы в промышленности Далее: Преобразования Конечно, можно иметь несколько исполнительных механизмов, действующих параллельно. На практике в промышленных роботах применяются, как правило, только конструкции исполнительных механизмов, соединенных последовательно. Но даже если рассматривать все возможные конструкции манипуляторов (для трех главных осей), то при игнорировании тех, которые фактически не позволяют образовать полезную рабочую зону, остаются еще 37 различных возможных конструкций для систем. На рис. 1 представлена новая конструкция робота типа «вращение — перемещение — вращение». В данной конструкции предплечье на конце горизонтальной телескопической опоры может вращаться в вертикальной плоскости, в результате чего образуется рабочая зона путем вращения всей системы вокруг вертикальной оси. До настоящего времени применялось небольшое количество конфигураций. При малой вычислительной мощности (что было до недавнего времени) удобнее было использовать такую конфигурацию робота, которая соответствует одной из обычных координатных систем (сферической или прямоугольной). Если это выполнено, можно перейти к определению координат, которые понятны как пользователю, так и роботу. В противном случае придется производить сложные вычисления для преобразования координат. Однако такие преобразования должны осуществляться с большой скоростью. Поэтому, пока не будет достаточной вычислительной мощности, преобразования выполнять в реальном масштабе времени нельзя. Кроме трех степеней свободы (осей движения), которые должны иметь все роботы, узел запястья включает от одной до трех дополнительных степеней свободы в зависимости от назначения робота. Запястья проектируются в модульном варианте так, что одна и та же модель робота может быть снабжена различным числом степеней свободы. В настоящее время получила распространение практика, когда спустя несколько лет владельцы отсылают на завод, например, пятиосные роботы для доукомплектования до шести осей, расширяя таким образом область их применения.
Рис. 1. Гипотетическая модель робота с последовательностью движений «вращение — перемещение — вращение»
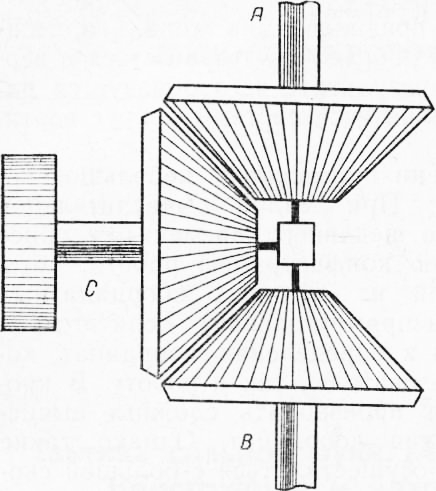
Запястья устроены так, что каждая ось вращения проходит через одну и ту же точку. Чтобы обеспечить вращение вокруг продольной оси и движение типа поиска, обычно применяют дифференциально-зубчатый механизм, показанный на рис. 2. Валы А и В приводятся в движение независимо друг от друга, а рабочий орган крепится к концу вала С. Если валы А и В движутся с одинаковой скоростью, но в противоположных направлениях, то вал С вращается относительно главной оси, приводя в движение рабочий орган. Если валы А и В оба движутся в одинаковом направлении (и с одной и той же скоростью), то вал С не будет вращаться относительно оси валов А и В, вызывая вращение рабочего органа. Неодинаковые скорости валов А и В приведут к одновременным движениям типа вращения вокруг продольной оси и поиска. На практике наиболее часто применяются конструкции роботов, действующих в угловой системе координат. Многие роботы имеют рабочие зоны, представляющие собой полный сфероид вокруг центральной оси, причем базовый узел может вращаться, не совершая полного оборота, а рука совершает движения относительно вертикального положения, делая таким образом доступным любой сектор. Вращающиеся руки наиболее применимы для сборочных работ, тем не менее используются конструкции типа «СКАРА», которые остаются жесткими в вертикальном направлении при небольшой податливости в горизонтальной плоскости. Роботы, действующие в прямоугольной системе координат, можно применять для сборки.
Рис. 2. Дифференциально-зубчатый механизм
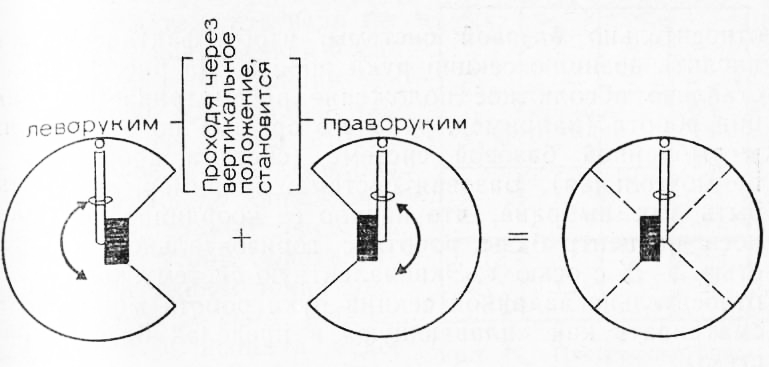
Рис. 3. План сочлененной руки робота, показывающий, как лево-и праворукие конфигурации образуют рабочие зоны, перекрывающие друг друга
Для перемещения тяжелых грузов часто используются роботы, действующие в цилиндрической системе координат, поскольку центральную стойку можно сделать очень жесткой, закрепляя ее сверху и снизу. Для обслуживания станков цилиндрические конфигурации роботов не применяются, так как здесь необходимо горизонтальное движение. Наконец, роботы, действующие в сферической (полярной) системе координат, могут обладать большой гибкостью в отношении труднодоступных мест и способны перемещать более тяжелые грузы, чем эквивалентное им устройство, действующее в угловой системе координат. Поэтому «полярные» роботы применяются при точечной сварке или перемещении материалов. Реклама:Читать далее:ПреобразованияСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|