|
|
Категория:
Роботы в промышленности Далее: Типы захватов Определение расстояния до близкорасположенного объекта. Существует группа датчиков, которая фактически не включает осязание, тем не менее они реагируют на близкорасположенные объекты. Максимальный диапазон действия таких датчиков составляет около 30 см, но многие выпущенные образцы могут действовать на значительно более близких расстояниях. Некоторые из устройств, используемых для осязания, пригодны также и для определения приближения к объекту, как, например, индукционные и емкостные системы. Индукционные системы могут чувствовать металлы на расстоянии в несколько миллиметров, тогда как емкостные системы— наличие непроводящих материалов, таких, как дерево или стекло, а также железа и цветных металлов на расстояниях до нескольких сантиметров. Разновидность обнаружения близости объекта основана на использовании струй воздуха, которые отклоняются или отражаются, если объект оказывается вблизи. В таких системах могут использоваться жидкостные логические системы, с тем чтобы применить это отражение для непосредственного вызова требуемой реакции. Наиболее распространены датчики приближения к объекту, основанные на оптических методах, когда инфракрасный или видимый свет, излучаемый передатчиком, размещенным в модуле датчика, фокусируется в точку пространства, находящуюся на расстоянии в несколько сантиметров от датчика. Фотодатчик, размещенный в том же модуле, что и передатчик, фокусируется на ту же точку пространства. Когда в точке нет объекта, свет, отражаемый обратно к датчику, очень слаб. При приближении какой-либо поверхности к точке отражение увеличится и приведет к образованию максимального сигнала, когда поверхность окажется точно в точке фокуса. Такие устройства занимают объем всего в несколько кубических сантиметров и размещаются на рабочем органе робота. Они способны очень точно измерить расстояния, но когда более важно увеличить диапазон измерения расстояния, свет не фокусируется в одной точке и датчик только регистрирует уровень отраженного света, который зависит от расстояния и типа поверхности отражающего объекта. Устройства такого типа могут регистрировать объекты, удаленные на десятки сантиметров: некоторые объекты отражают свет слабо, другие — хорошо, иногда из-за положения объекта сигнал будет идти мимо датчика. Поэтому все эти проблемы возникают и с прозрачными материалами. Датчики способны модулировать собственное излучение (обычно в несколько килогерц) и регистрировать только отраженный свет, модулированный таким же образом, отфильтровывая посторонние сигналы. Дальнее обнаруокение объектов. Информацией об объекте или внешнем мире робот могут обеспечить датчики ближнего расстояния и некоторые визуальные системы. Существуют различные подходы, специфичные для дальнего обнаружения. Наиболее популярный — использование ультразвука. В таких системах используется сонарный принцип передачи коротких импульсов ультразвука (с частотами, превышающими 20 кГц) от пьезоэлектрического кристалла и последующего измерения времени, необходимого для возвращения отраженного импульса от соседнего объекта. Зная скорость распространения звука в воздухе (около 300 м/с), можно подсчитать расстояние, проходимое звуковым импульсом, а разделив полученную величину пополам, получить расстояние до объекта. Фирма «Поляроид» разработала ультразвуковой искатель для автоматического фокусирования своих камер. Сонар «Поляроида» экономичен, поскольку выпускается поточным способом и имеет отработанную конструкцию. В некоторых других системах, основанных на использовании более коротких волн, ультразвук более высоких частот позволяет получить более высокое разрешение. Такие системы способны составить карты местности (с использованием информации о глубине). Однако более низкие частоты имеют преимущества, поскольку меньше ослабляются в воздухе и применяются для измерения более длинных расстояний. Точность определения дальности ультразвуковых систем колеблется в пределах порядка 1 см для дальности в несколько метров при использовании сигнала в 40 кГц, а звуковой сигнал 1 кГц дает точность порядка 30 см при дальности 50 м и более. Система «Поляроид» снабжена цифровым выводом, и на практике точность составляет около 1 см при расстояниях от 0,3 до 30 м. Датчик определяет отражения в пределах 20° от главной оси, хотя это значение можно существенно уменьшить, поместив его в специальный звукоприемник. Обеспечить круговой обзор возможно благодаря использованию соответствующих акустических рефлекторов, разворачивающих луч до 90° от главной оси. При использовании составных сонарных систем необходимо различать источники импульсов. Это можно сделать путем использования либо различных частот для различных систем (если число этих систем не слишком велико), либо различных скоростей импульсов для различных передатчиков. В этих системах отраженный сигнал регистрируется только при совпадении частоты регистрации и частоты датчика. Возможны различные усовершенствования для упрощения сонара, например использование фазированных решеток для формирования узконаправленного импульса в отличие от традиционных лучей, где угловое разрешение составляет более 10°. Однако маловероятно, что такая постановка задачи облегчит решение по сравнению с анализом визуальной информации. Несмотря на преимущества, ультразвуковые устройства могут приводить к акустической интерференции, и так как некоторые поверхности (особенно материалы, подобные губке) поглощают переданный сигнал, любая большая плоская поверхность действует как акустическое зеркало, которое, пока оно стоит «носом», может привести к тому, что большие поверхности вообще не будут обнаружены. Отраженные сигналы быстро затухают с расстоянием, так что эхо от соседних объектов может заглушить отзвуки от объектов, расположенных дальше. Дальномеры, использующие лазерные лучи или радиоволны, как в радаре, не подходят для коротких расстояний, характерных для робототехники, так как время распространения этих излучений составляет всего несколько наносекунд на метр расстояния (хотя для некоторых космических роботов такие системы идеальны) . В целях безопасности можно использовать Доппле-ровские системы — устройства, измеряющие Изменения в высоте тона сигнала, распространяющегося от относительно движущегося объекта. Хотя они и не обеспечивают полной информации о расстоянии, зато хорошо чувствуют относительное движение. В основе метода определения расстояния до объекта используется триангуляция (тригонометрическая съемка), когда два устройства размещаются вдоль базовой линии на расстоянии друг от друга, угол между базовой линией и заданным объектом тщательно измеряется каждым устройством. Сравнивая оба показания, можно вычислить фактическое расстояние до объекта. Оптические системы, пригодные для роботов, могут либо применять пассивную освещенность, где используется только окружающий свет и триангуляция проводится с помощью стереозрения, либо метод активной освещенности, исключающий трудности при регистрации изображения. При методе активной освещенности медлен-но сканирующий коллимационный источник света (например, твердотелый инфракрасный излучатель или лазер) образует широкое пятно света, движущееся по поверхности соседних объектов. Пятно обнаруживает быстро сканирующее сенсорное устройство (источник света обычно модулируется, с тем чтобы помочь выделить его от фонового освещения). Серии триангуляционных показаний строятся по мере сканирования пятна через окружающую среду. Зрение. Зрение робота должно стать жизненно необходимым сенсорным устройством в сложных системах. По некоторым оценкам, промышленность, изготавливающая системы технического зрения, ежегодно удваивает их выпуск. Возможно, к 1990 г. выпуск таких систем достигнет 1 млрд. долл. От других органов чувств системы технического зрения отличаются тем, что, обладая необходимой быстротой, оставляют объект в неприкосновенности. Такие сенсорные устройства обеспечивают большой объем информации о видимой обстановке — от распознавания типа, местоположения, дальности и ориентации объектов до сложной информации обратной связи, необходимой манипулятору или тележке для выполнения задачи. Сенсорные устройства можно использовать для визуального наблюдения и контроля качества. Методы, применяемые в системах технического зрения роботов, очень сложны, поэтому рассмотрим их только в общих чертах. Стоит также напомнить, что многое из того, что связано с обработкой изображения, применимо и к другим сенсорным устройствам, таким, как тактильные датчики. Дело в том, что многие из первых работ по созданию искусственного зрения стимулировались заинтересованностью НАСА в создании таких систем для исследований космического пространства. В 1973 г. в Ноттингемском университете (Великобритания) была создана первая система зрения робота — система «СЕРЧ» (полуинтеллектный робот для манипулирования компонентами). Система состояла из подвижного захвата, управляемого компьютером, который определял положения простых форм, попадавших в поле зрения камеры. В пределах 5 с объекты могли быть опознаны и подвергнуты манипуляции. К сожалению, отсутствие коммерческого интереса к разработке привело к тому, что система не нашла широкого применения. Камеры, используемые в системе зрения роботов, можно поместить сверху или сбоку робота. Прикрепив камеру к запястью робота, можно получить хороший обзор рабочей зоны. Развитие волоконной оптики дало возможность устанавливать камеры на небольшом расстоянии от запястья и передавать изображение посредством системы зеркал или по кабелю, состоящему из волокон. Это дает возможность получать изображения даже из таких мест, где камеру нельзя установить, например в ладони захвата. Такие камеры представляют собой либо телевизионные трубки типа «видикон», либо твердотелые камеры (приборы с зарядной связью ПЗС — устройства или камеры, в которых данные накапливаются посредством мельчайших пакетов электрических зарядов), состоящие из мозаики (или иногда только линий) отдельных фоточувствительных элементов. Хотя такие ПЗС-камеры представляют относительно новую технологию, можно ожидать, что благодаря исключительной надежности и своим размерам, массе и характеристикам потребляемой мощности они скоро в значительной степени вытеснят традиционные телевизионные трубки в системах искусственного зрения роботов. Можно применять и простые камеры, состоящие из одного ряда фотоэлементов, для получения полного двумерного изображения, при размещении линейно-сканирующей камеры поперек конвейера. Разрешающая способность системы технического зрения определяется числом отдельных точек (или элементов изображения), которые должны быть различимы на изображении и обычно не превышают 512X512 элементов. Изображения с разрешением ниже 64X64 элемента ухудшаются при цифровой обработке. В традиционных телевизионных трубках ухудшение может быть весьма значительным, в то время как в твердотелых камерах благодаря присущей им структуре достоверность изображения очень высока. Аналоговый сигнал любой из используемых камер преобразовывается в цифровую форму на аналогово-Цифровом преобразователе, а информация накапливается так, чтобы ее мог обработать компьютер. Накопитель информации — это устройство для хранения основы телевизионного изображения для последующей компьютерной обработки. Это устройство входит в состав быстрой памяти компьютера, для которой каждый адрес памяти соответствует элементу изображения. Каждый элемент изображения может быть простым элементом черного или белого цвета. В сложных системах отдельный элемент можно представить в цифровой форме любого из 256 серых тонов, изменяющихся в диапазоне от черного до чисто-белого. В будущем зрение робота сможет использовать цветную информацию. В настоящее время представляется весьма спорным вопрос, оправдываются ли в большинстве областей применения роботов небольшие дополнительные преимущества использования цвета с учетом необходимых дополнительных компьютерных вычислений. Только некоторые системы зрения роботов используют информацию о серых тонах, другие же системы в целях экономии времени вычислений поступают следующим образом, создавая бинарный вариант, предварительно «вычисляют» изображение. Затем, выбирая пороговый уровень яркости, можно сделать каждый элемент изображения черным, если его значение ниже порогового, и белым, если больше. Так создается силуэт. Освещение таких систем играет важную роль, т. е. если тени на объекте принять за фон, то воспринимаемая форма объекта радикально изменится. Что же касается сильно отражающих объектов, то они также могут вызвать ложные эффекты. Изменение порогового уровня отрицательно отразится на интерпретации системы объекта. Чтобы преодолеть эти трудности, объекты освещают снизу, а если это невозможно, то применяют трубчатые флюоресцентные лампы. Можно также поместить объекты на фоне, покрытом флюоресцентными материалами, а затем осветить их ультрафиолетовым светом, чтобы создать резкий контраст между фоном и лежащими нефлюоресцентными объектами. Цветные фильтры перед линзами камеры значительно усиливают контраст. Пассивное освещение важно, если требуется получить ясное изображение интересующих деталей, и часто общая надежность и эффективность данной системы зрения определяются тем, насколько удачно это сделано. С помощью разных методов роботы способны различать объекты на общем фоне. Например, контуры объектов можно определить по изменениям в цвете или яркости или по фону, который они «вымарывают». Если изображение меняется в течение времени, то объекты можно различать благодаря относительному движению между ними и их задним планом, фактическому движению относительно друг друга, движению наблюдателя, вызывающему изменение в положении объекта вследствие параллакса. Эффект параллакса можно получить с помощью стереовидения, как это делает человек (в некоторых случаях можно даже использовать больше, чем два вида объектов). Наиболее распространенная форма определения в визуальных системах некоторых простых компонентов рабочей сцены, используемая в сложных системах роботов с применением серых тонов, включает определение контура объектов. Первый этап действия таких систем, обрабатывающих изображения, заключается в делении изображений на участки с одинаковой яркостью или цветом. Определение контура включает измерение изменений в яркости по всему изображению. Резкое изменение интенсивности отмечается на контурной карте. Специальная аппаратура позволяет с большой скоростью выполнить процессы определения контуров. Иногда поступают иным образом — поверхности в фактической обстановке разделяются путем поиска областей адекватной яркости. Поскольку предполагаемые «края» на контурной карте, как правило, представляют собой короткие прерывистые линейные сегменты, то задача заключается в том, чтобы соединить их в непрерывные линии, которые бы соответствовали фактическому контуру объектов. Результаты обработки накапливаются в более сжатой форме представления данных с помощью, например, такого метода, согласно которому линии описываются путем задания (для каждого элемента изображения на линии) направления (одного из восьми возможных направлений) следующего элемента изображения. Наиболее трудным для робота является конечный этап, когда производится распознавание образов, т. е. признаки изображения должны соответствовать признакам объектов, о которых система «знает». Широко распространены два подхода: шаблонное соответствие, когда код изображения подбирается к набору «шаблонов» возможных объектов и выбирается лучшее соответствие; распознавание по признакам, когда набор полученных признаков более высокого уровня, таких, как площадь, периметр, центр площади, подбирается к набору соответствующих признаков известных объектов. На практике трудно решить такую проблему, как частичное перекрывание одной детали другой. Задача выбрать одну деталь из нескольких для многих стала символом совершенства, к которому должно стремиться зрение роботов. Эта проблема впервые была решена в университете Род Айленд. Однако этот метод, прежде чем применять в промышленности, необходимо значительно улучшить.
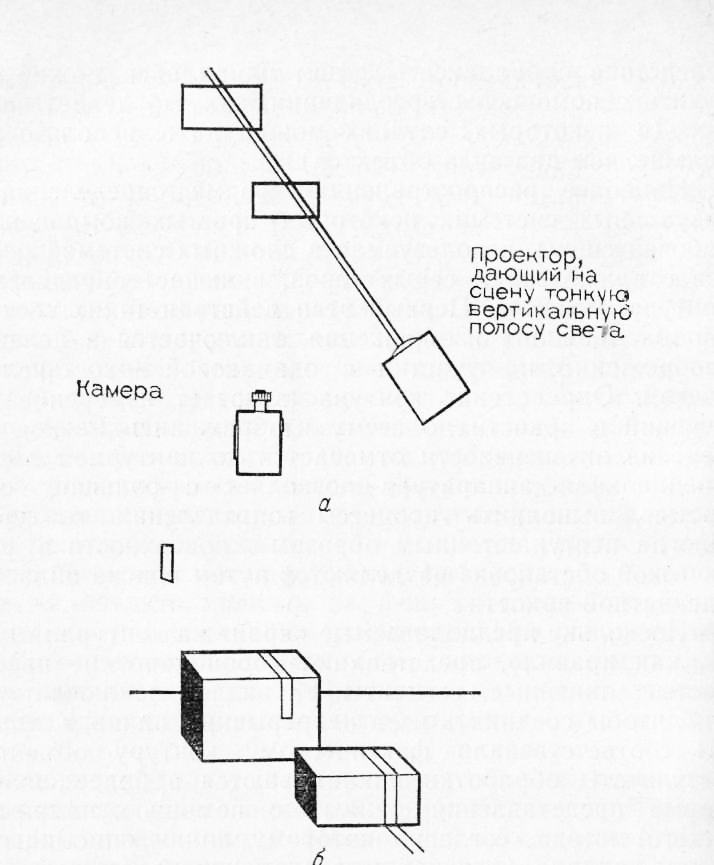
Рис. 1. Принцип действия структурированного света:
а —план системы; б — вид сцены со стороны камеры
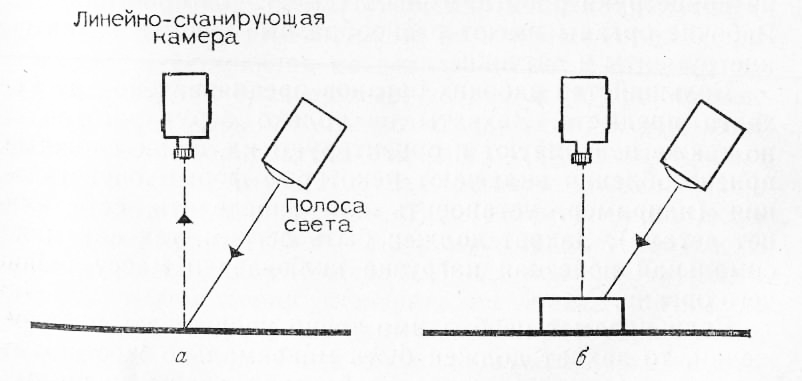
Глубина информации трехмерного изображения может быть визуально получена путем либо активной, либо пассивной освещенности. Если для определения расстояния нельзя использовать специальную технику освещения, следует получить и обработать изображение сцены с различных точек наблюдения, либо применяя две (или более) слегка удаленные друг от друга камеры, либо используя одну камеру, которая может двигаться. В том и в другом случае определенные точки в каждом изображении должны соответствовать друг другу, и зная угол установки камеры относительно сцены, можно вычислить расстояние до точек, используя простую триангуляцию. Системы изображения в основном двумерные, использующие ограниченный объем информации о глубине для различения объектов, обычно относятся к 2 y-мерной системе. В триангуляционных системах активной освещенности камера стоит на одном конце базовой линии, а сканирующий лазер (или его эквивалент)—на другом. Камера может легко обнаружить яркое пятно лазера и определить эффективный угол к нему, используя элемент изображения, на который он падает. Корреляция угла с текущим значением угла сканирующего луча позволяет определить расстояние до пятна с помощью триангуляции. Другой формой активной освещенности, используемой в некоторых системах зрения роботов, является структурированный свет. Такие системы проектируют тонкую полоску света (вместо единственного пятна) на сцену (рис. 1), одновременно получая огромное число триангуляций. Тот же метод использовался для , получения ясных двумерных изображений крупных объектов на конвейере, проходящих под линейно-сканирующей камерой. Полоска света сияет в плоскости, которая находится под углом к плоскости обзора камеры, но сделано так, что две плоскости пересекаются на конвейере на линии точно под камерой (рис. 2, а). Где конвейер пуст, камера видит яркую полоску света, но там где появляется крупный объект, сверху кажется, что линия отклоняется от обзора камеры (рис. 2,б). Этот принцип применен в системе «Консайт», разработанной фирмой «Дженерал Моторс» в 1977 г., где используются две полоски света, проектирующиеся из различных точек. Использование таких простых методов должно в значительной степени послужить промышленности, пока действительно не станут доступны дешевые и быстрые сложные системы искусственного зрения.
Рис. 2. Принцип действия системы «Консайт»
В настоящее время продаются отдельные системы зрения роботов, но их стоимость составляет около 25 000 долл.— половину или больше стоимости настоящего «слепого» робота, к которому будет придана эта система. Однако «АСЕА» ввела первую интегрированную «систему зрения», работающую в заводских условиях, которую могут элементарно программировать рабочие. Подсчитано, что в 1981 г. в США роботов, оснащенных системами технического зрения, насчитывалось около 1%, к 1990 г. эта цифра приблизится к 25%. Реклама:Читать далее:Типы захватовСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|