|
|
Категория:
Роботы в промышленности Далее: Податливость Спроектировать захват — достаточно трудная задача, поскольку число манипулируемых деталей постоянно увеличивается. Некоторые роботы оснащены устройством, состоящим из двух независимых захватов на одном запястье. При вращении запястья тот и другой захват будут перемещаться в нужное положение, например один захват устанавливает детали в металлорежущий станок, а другой — снимает детали. Эта конструкция применяется, когда необходимо манипулировать деталями двух различных форм. Если же предметы имеют несколько различных форм, используются робототехниче-ские системы, способные автоматически заменять либо часть, либо весь захват. Это можно осуществить, прикрепляя различные захваты к выступу на запястье робота или прикрепив один постоянный захват для взятия других захватов. В настоящее время в МТИ (США), Крэнфилдском технологическом институте (ВБ) и ИПА (Штутгарт) разработаны универсальные захваты, способные брать большое число различных деталей. Универсальные захваты представляют собой три или более (часто независимо управляемых) объединенных пальца по аналогии с человеческой рукой. Заманчиво попытаться непосредственно подражать человеческой руке, но поскольку для этого требуется иметь 22 степени свободы, то такую задачу чрезвычайно трудно решить. На практике, по-видимому, всего три пальца могут эффективно манипулировать многими деталями. В большинстве проектов применяется захват с тремя пальцами с различной степенью обратной связи, так как эффективность такого устройства значительно выше эффективности других устройств. При пассивном подходе к формированию адаптации используется традиционный захват, у которого пальцы имеют прокладки с обивкой, заполненной сыпучим порошком.
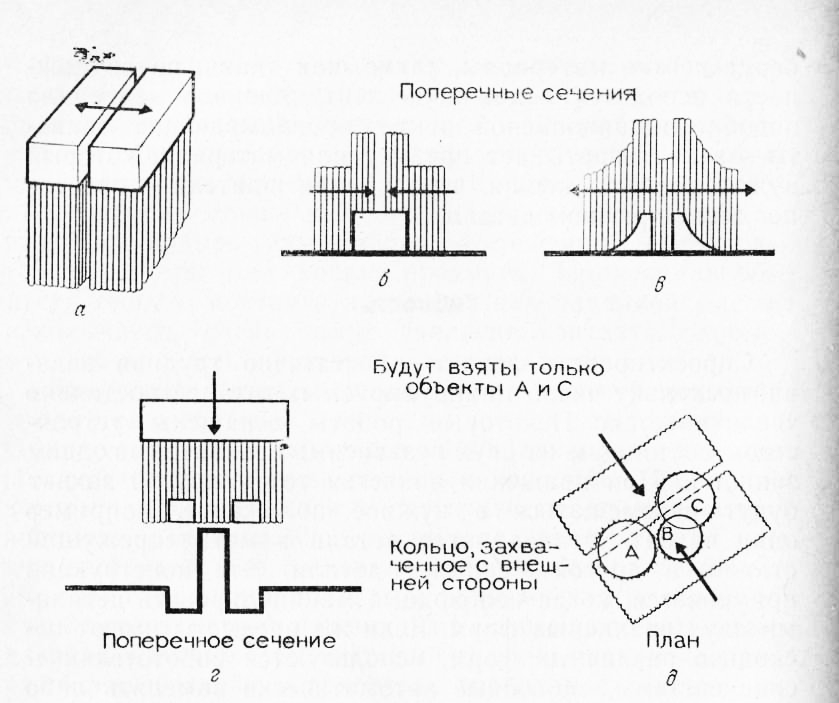
Рис. 1. Принцип действия универсального захвата «Омнигриппер»
Когда предмет забирается роботом, набивка образует форму вокруг поверхности предмета и затем фиксируется, предшествуя движению захвата соединением всех частиц вместе. Это возможно при электронамагничивании железных частиц или при применении вакуума для заполнения. Однако при таком пассивном подходе и антропоморфной руке трудно почувствовать, где точно находится взятый предмет относительно запястья робота. Конструкция захвата, разработанная в Государственном колледже (Лондон), которая, видимо, разрешит некоторые из этих проблем, получила название «Омнигриппер». Этот захват оснащен двумя параллельными слегка разделенными пальцами, каждый состоит из множества тесно расположенных стержней 8X16, которые перемещаются вверх и вниз независимо друг от друга (рис. 1, а). Опускание захвата на предмет выталкивает некоторые стержни вверх, образуя таким образом нечто вроде пальцев, приспособленных к детали. Чтобы захватить предметы с внешней стороны, разделенные пальцы должны быть сдвинуты вместе (рис. 1, б) или слегка раздвинуты (от «закрытой» позиции) для захвата с внутренней стороны (рис. 1,а). Обратную. связь от каждого стержня «Омнигриппе-ра» обеспечивает тактильная информация об объекте (включая параметры высоты), позволяющая распознавать предметы,— это компенсация за неточное позиционирование детали и восприятие внешней обстановки. Стержни, фактически не держащие предмет, будут подняты вверх, если они коснутся чего-то нового (рис. 1, г). «Омнигриппер» одновременно берет два предмета и более и используется для выбора и разделения заходящих друг на друга деталей, потому что фактически захватываются только те детали, которые окружены стержнями двух пальцев (рис. 1, д); другие лишь сдвигаются. Реклама:Читать далее:ПодатливостьСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|