|
|
Категория:
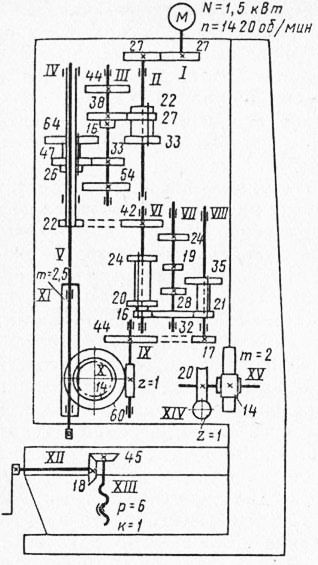
Сверление металла Кинематическая схема станка определяет: пути и способы передачи движения от одного механизма станка к другому; характер и направление этих движений; число и величину скоростей исполнительных органов станка. Привод исполнительных органов вертикально-сверлильного станка мод. 2Н118 (рис. 1) расположен в сверлильной головке и осуществляется от односкорост-ного электродвигателя (мощность 1,5 кВт; частота вращения 1420 об/мин). Цепь главного движения (вращения шпинделя). Уравнение кинематического баланса цепи главного движения приведено ниже.
Рис. 1. Кинематическая схема вертикального станка мод. 2Н118
Направление вращения шпинделя изменяют реверсированием электродвигателя. Вертикальное перемещение стола осуществляют вручную. Для этого вращают рукоятку на валу XII. Через конические зубчатые колеса 2= 18; 45 движение передается на однозаходный ходовой винт XIII (с шагом Р — 6 мм). При этом стол вместе с винтом перемещается вертикально относительно неподвижной гайки. Установку сверлильной головки также осуществляют вручную. Вращением рукоятки сообщают движение валу XIV. Через червячную пару z— 1; 20 оно передается на вал XV. Установленное на последнем зубчатое колесо z = 14 находится в зацеплении с рейкой (т = 2 мм), которая неподвижно закреплена на стойке. Реклама:Читать далее:Приспособления для установки заготовокСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|