|
|
Категория:
Металлорежущие станки Необходимость в функциональной связи между перемещениями отдельных рабочих органов станка, или подвижных элементов одного рабочего органа, возникает при использовании методов кинематического профилирования для воспроизведения образующей или направляющей линии, либо той к другой одновременно. При рассмотрении методов получения обрабатываемых поверхностей на металлорежущих станках был приведен ряд примеров воспроизведения образующих и направляющих линий по методу кинематического профилирования: профилирование образующей линии конической поверхности, профилирование направляющей линии в форме спирали Архимеда дискового кулачка, профилирование винтовой направляющей линии, профилирование образующей линии в форме эвольвенты, одновременное кинематическое профилирование образующей и направляющей линий. При кинематическом профилировании либо образующей, либо направляющей линии функционально связываются перемещения двух рабочих органов, или двух подвижных элементов одного рабочего органа. Такая функциональная связь может быть названа одинарной. При одновременном кинематическом профилировании и образующей и направляющей линий функционально связываются три перемещения и такая функциональная связь является двойной. Характер функциональных связей, к соответственно и кинематических цепей, используемых для осуществления этих связей, зависит от формы воспроизводимой траектории движения режущего инструмента относительно обрабатываемой детали.
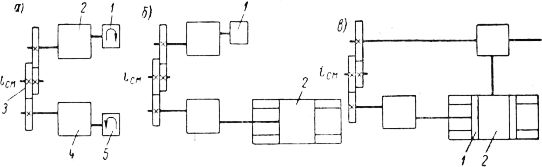
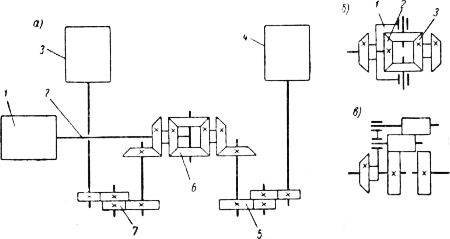
Рис. 1. Структурные схемы при одинарных линейных функциональных связях. Двойные линейные функциональные связи. При двойных функциональных связях перемещение одного из рабочих органов функционально связано с перемещением двух других рабочих органов. При наличии в схеме суммирующего дифференциала каждая из кинематических цепей, связывающих движение рабочего органа с движением рабочих органов, может быть настроена независимо одна от другой. Первая кинематическая цепь связывает движение рабочего органа с движением рабочего органа через сменные шестерни, постоянные передачи, дифференциал и Т-образный валик; вторая кинематическая цепь связывает движение рабочего органа с движением рабочего органа через сменные шестерни, постоянные передачи, дифференциал и Т-образный валик. Движение, поступающее от каждой из кинематических цепей, суммируется на Т-образном валике дифференциала.
Рис. 2. Структурные схемы при двойных линейных функциональных связях. Уравнения для определения передаточных отношений каждой из кинематических цепей могут быть получены так же, как при одинарной функциональной связи. Для суммирования движений при двойной функциональной связи могут быть использованы различные схемы дифференциалов. В схеме, представленной на рис. 2, б, движение от одной кинематической цепи передается кожуху, в котором смонтированы оси сателлитов, а от другой — шестерне. Суммирование движений осуществляется на шестерне. Передаточное отношение дифференциала при передаче движения через кожух равно 2, а через шестерню. В ряде случаев применяются также дифференциалы с цилиндрическими зубчатыми колесами. Двойная функциональная связь может быть также осуществлена и при отсутствии в схеме суммирующего дифференциала, что с одной стороны приводит к упрощению схемы, с другой. — к усложнению настройки. В качестве примера рассмотрим структурные схемы двойной кинематической связи при нарезании косозубых цилиндрических колес с дифференциалом и без дифференциала. Схема с дифференциалом аналогична схеме, представленной на рис. 3, в, первого раздела. В схему введена дополнительная передача 1—2 и сменные шестерни, через которые осуществляется движение подачи. Подача, как это указывалось выше, задается в мм на оборот заготовки. Величина подачи выбирается из технологических соображений и настраивается сменными шестернями. Установленная величина подачи не влияет на настройку кинематических цепей, осуществляющих функциональную связь. В схеме, представленной на рис. 3, б,
Рис. 3. Структурные схемы при двойных линейных функциональных связях:
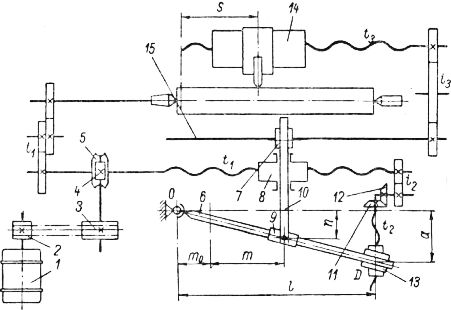
Рис. 4. Кинематическая схема для воспроизведения винтовой образующей линии с переменным шагом. Подставляя в выражение вместо s выражение CiCM3 мы можем убедиться, что передаточное отношение iCMl является функцией передаточного отношения iCM3. Для того чтобы получить правильную форму поверхности зуба необходимо с высокой точностью подобрать сменные шестерни, так чтобы фактическое передаточное отношение iCMS было равно расчетному. Точный подбор сменных шестерен представляет значительные трудности, вследствие чего при двойной функциональной связи предпочитают использовать схемы с суммирующим дифференциалом. Однако в некоторых моделях зубообрабатывающих станков используются благодаря их простоте схемы без суммирующих дифференциалов. Нелинейные функциональные связи. В качестве примеров кинематических цепей, позволяющих осуществить нелинейные функциональные связи, рассмотрим кинематические цепи станков, один из которых предназначен для образования винтовой поверхности с переменным шагом, а другой — для образования профиля дискового кулачка, обеспечивающий изменение ускорения либо по косинусоидальному, либо по синусоидальному закону. Станок для нарезания резьб с неравномерным шагом получает движение от электродвигателя через ременную передачу и червячную. Движение суппорта функционально связано с вращением шпинделя. Шпиндель станка непосредственно связан гитарой сменных Из полученного выражения видно, что шаг резьбы возрастает пропорционально углу поворота шпинделя. Для настройки станка должны быть заданы данные, характеризующие нарезаемую резьбу, например начальный и конечный шаг и число витков, или начальный и конечный шаг и длина резьбы. Схема кинематических цепей для профилирования дисковых кулачков представлена на рис. 5, а. Дисковый кулачок устанавливается на
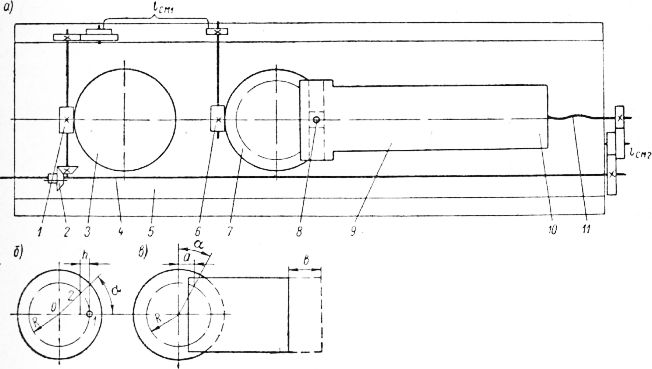
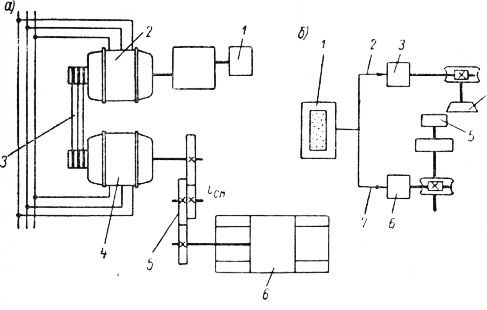
Рис. 5. Кинематическая схема для воспроизведения образующей линии профиля кулачка, обеспечивающего изменение ускорения по синусоидальному или косинусоидальному закону. круглом столе, сидящем на одной оси с червячным колесом. Круглый стол, получающий вращательное движение, одновременно перемещается вместе с продольным столом. Обработка профиля производится концевой фрезой или шлифовальным кругом. Направляющая линия воспроизводится благодаря наличию функциональной связи между перемещениями круглого и продольного столов. Продольное перемещение стол получает от кривошипного пальца, который входит в кулисный паз ползуна. Одновременно с вращением кривошипного пальца может перемещаться ползун. Таким образом, при продольном перемещении стола происходит суммирование двух движений. Вращение кривошипного пальца и перемещение ползуна функционально связаны с вращением заготовки; соответствующие кинематические цепи, осуществляющие функциональную связь, настраиваются сменными шестернями iCMl и iCM 2, а также установкой радиуса кривошипного пальца. Известно большое число различных механизмов для воспроизведения математических кривых, однако создание настраиваемых кинематических цепей для воспроизведения кривых с различными параметрами представляется задачей более сложной, поэтому станки с кинематическими цепями для осуществления нелинейных функциональных связей встречаются сравнительно редко. Дистанционные передачи и вычислительные устройства для осуществления функциональных связей. При сложном пространственном расположении рабочих органов, при большем числе промежуточных подвижных элементов и при большом расстоянии между подвижными рабочими органами жесткие кинематические связи становятся сложными, что с одной стороны приводит к усложнению конструкции станка, с другой — к снижению точности функционально связанных перемещений. Поэтому в отдельных случаях жесткие кинематические связи заменяются синхронными дистанционными передачами. В качестве дистанционной передачи при функциональной кинематической связи используется передача с сельсинами. Функционально связанными являются перемещения рабочих органов. Рабочий орган получает движение от отдельного электродвигателя через сменные шестерни. Электродвигатель, называемый сельсином- приемником, связан электрической цепью с сельсином-датчиком, который получает вращение от рабочего органа. Сельсин-датчик и сельсин-приемник присоединены к общей сети. При повороте ротора сельсина-датчика на какой-то угол <р на такой же угол поворачивается ротор сельсина-приемника. Отклонение угла поворота ротора сельсина-приемника от угла поворота сельсина-датчика измеряется долями градуса. .Сельсины, выпускаемые промышленностью, обладают сравнительно небольшой мощностью и не могут быть непосредственно использованы для перемещения рабочих органов станка. Такие сельсины могут работать совместно с гидроусилителями моментов. В качестве силовых сельсинов могут быть применены асинхронные электродвигатели с фазовым ротором, включенные по соответствующей схеме. Дистанционные передачи с сельсинами применяются в некоторых моделях зубошлифовальных станков, в крупных токарных станках в кинематических цепях для воспроизведения винтовой направляющей линии. В последнем случае при нарезании резьбы движение сообщается верхнему суппорту, на котором непосредственно устанавливается сельсин-приемник, что приводит к значительному упрощению кинематической схемы станка. При дистанционной передаче с сельсинами настройка кинематической цепи в соответствии с заданной функциональной связью перемещений рабочих органов производится с помощью сменных шестерен или других механических передач; при использовании вычислительных устройств в системе управления перемещениями рабочих органов функциональная связь задается в программе. Выше были приведены примеры использования вычислительных устройств для воспроизведения образующей и направляющей линий. Вычислительные устройства могут быть также использованы для осуществления функциональной связи между перемещениями рабочих органов при воспроизведении образующей линии по методу огибания. Принципы применения вычислительного устройства для воспроизведения образующей по методу огибания иллюстрирует блок-схема, представленная на рис. 6, б. В программе зафиксирована информация, на основе которой вычислительное устройство вырабатывает сигналы, поступающие по связям к управляемым приводам, которые осуществляют вращение долбяка и заготовки. Характером поступающих сигналов определяются величины перемещений долбяка и заготовки. Подобные схемы использованы в зубодолбежных станках для нарезания некруглых колес, в зубофрезерных станках, в станках для обработки конических колес. Однако широкого промышленного применения подобныё схемы еще не получили.
Рис. II. 6. Дистанционная передача с электрическим валом в кинематической цепи (а) и схема применения вычислительного устройства (б) для осуществления функционально связанных перемещений. Реклама:Читать далее:Коррекционные устройства и делительные механизмы кинематических цепей для осуществления функционально связанных перемещенийСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|

|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|