|
|
Категория:
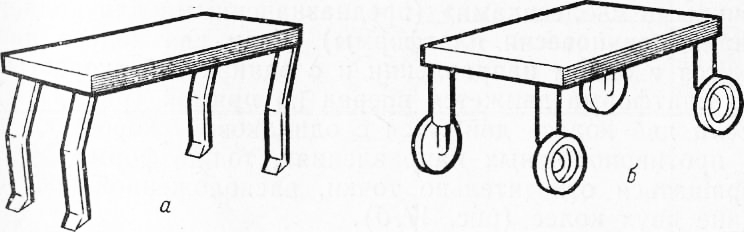
Роботы в промышленности Далее: Гидравлические приводы У мобильных роботов есть «традиционная» рука, размещенная на платформе. Варианты конструкции платформы показаны на рис. 1. Подвижные опоры конструкционно похожи на руки манипулятора, однако трудности, связанные с огибанием углов или перемещением по пересеченной местности при использовании подвижных опор вместо колес, пока не позволили создать мобильные роботы на подвижных опорах. Существует много проектов колесных или гусеничных платформ роботов. Аппаратам с управляемыми колесами требуется значительное пространство для огибания углов, но тем не менее они успешно применяются в различных устройствах (например, как автопогрузчики с вилочным захватом для робототехнических операций) .
Рис. 1. Различные конфигурации платформ мобильных роботов:
а — на подвижных опорах (гусеницах); б — управляемые рулем; в — с независимо управляемыми колесами
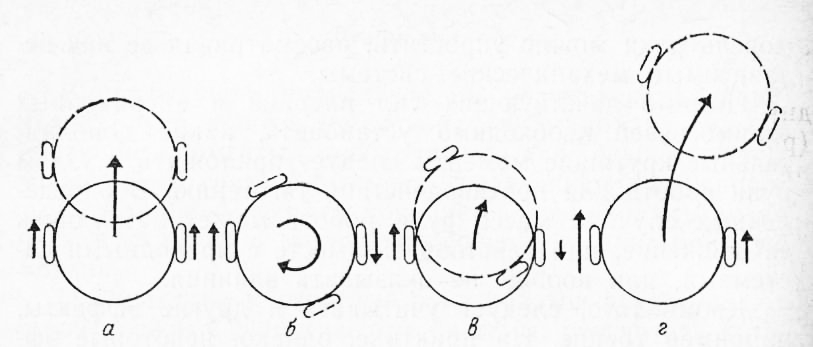
Рис. 2. Характеристики независимых приводных колес нерулевого управления
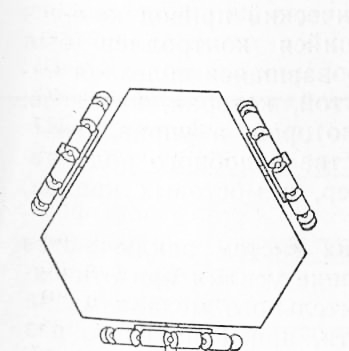
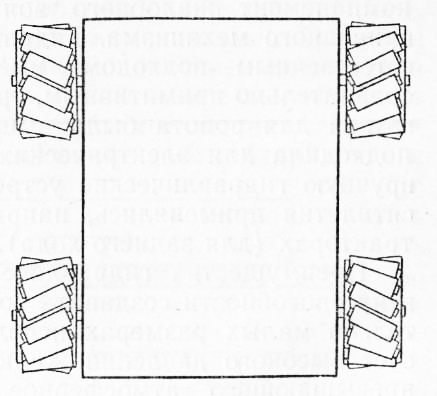
Рулевое управление Акермана (как в автомобилях) считается трудным для управления в ограниченных пространствах и невозможным для использования в робототехнике. В основном управляется фактически одно колесо, а два других используются лишь для движения аппарата вперед. В системе, приближающейся по маневренности, т. е. с независимо направляемыми колесами, используются два (неуправляемых) независимых приводных колеса наряду с одним или несколькими пассивными «колесиками» (предназначенными для поддержания равновесия платформы). Если два колеса движутся в одном направлении и с одинаковой скоростью, то платформа движется вперед по прямой (рис. 2, а). Если два колеса движутся с одинаковой скоростью, но в противоположных направлениях, то платформа будет вращаться относительно точки, расположенной посередине двух колес (рис. 2,б). Следовательно, можно сделать так, чтобы платформа двигалась по отрезкам прямых между точками, направляясь к пункту, останавливаясь, вращаясь для поиска нужного направления, затем снова двигаясь в новом направлении и т. д. Если колеса двигаются с различными скоростями, то платформа будет вращаться относительно любой точки на линии между двумя колесами (колеса вращаются в противоположных направлениях. Если два колеса вращаются в од-ноМ направлении, то платформа двигается по дуге, ра-пиус которой зависит от отношения скоростей колес (рис. 2, г). Те же свойства относятся и к любым гусеничным аппаратам. Чтобы уменьшить пространство, требуемое для огибания углов, и решить вопросы, связанные с рулевым управлением, в конструкцию некоторых мобильных роботов включают транспортный механизм с независимо направляемыми колесами (например, колеса с роликами на периферии). На рис. 3 показан робот с тремя колесами, у которого неприводные ролики размещены на окружности каждого колеса, а колеса установлены вокруг платформы в виде равностороннего треугольника. Колесо может двигаться в любом направлении за счет вращения вокруг своей оси. Для выбора направления движения два или три колеса могут приводиться в движение одновременно, а так как платформа имеет контакт с грунтом лишь в трех точках, то подвесных систем не требуется. Четырехколесная конструкция (рис. 4) состоит из .платформы с четырьмя традиционно размещенными колесами, но с роликами, установленными под углом к окружностям каждого колеса. Платформа движется вперед и назад традиционным способом, но может перемещаться и боком при движении каждого колеса в противоположном направлении к двум другим. Подобным образом можно заставить платформу двигаться по окружности при движении колес на одной стороне в противоположном направлении к расположенным на другой стороне. Для контакта платформы с грунтом всеми четырьмя колесами необходимо использовать подвесную систему. Четырехколесная конструкция малоэффективна.
Рис. 3. Конструкция платимы с тремя независимо Управляемыми колесами
Рис. 4. Конструкция платформы с четырьмя независимо управляемыми колесами
По мере увеличения использования мобильных роботов в промышленности как для таких работ, как за* грузка удаленных друг от друга станков, так и для работ вне заводских цехов, например для работ в оранжереях, большее значение приобретает работа над различными модификациями конструкций подвижных платформ. Система привода, приемлемая для робота-манипулятора, закрепленного на полу, может не подходить к такому же манипулятору, который вынужден нести на себе энергообеспечение, куда бы он ни направлялся. Реклама:Читать далее:Гидравлические приводыСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|