|
|
Категория:
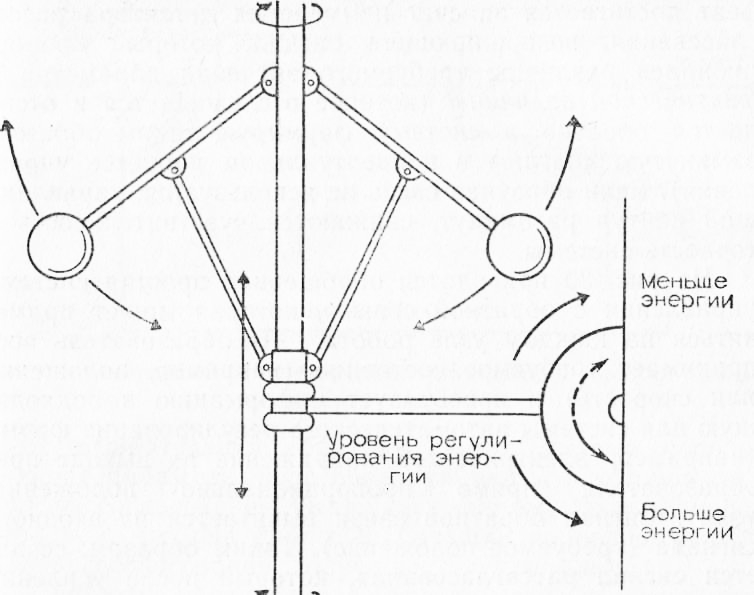
Роботы в промышленности Далее: Позиционное управление Если рассматривать старые паровые машины, которые стимулировали появление первых работ по теории управления, то можно увидеть, что проблемы, связанные с отсутствием сенсорного устройства для подтверждения действия управляющего сигнала, возникают, когда существует некоторое внешнее изменяющееся влияние на всю систему. Например, необходимо, чтобы выходное колесо паровой машины работало с постоянной скоростью. До тех пор пока нагрузка на колесо не меняется, можно было «.бы поставить рычаг, который регулирует мощность машины, в заданное положение. Достигнув определенной скорости, машина, вероятно, продолжала бы работать с той же скоростью. При увеличении мощности и машина увеличит скорость. Можно отметить положения регулятора рычага, соответствующие различным абсолютным скоростям. Но что, если нагрузка на машину начнет меняться или изменится давление пара, если бойлер будет нагреваться? Очевидно, отмеченные «абсолютные скорости» потеряют смысл. Когда происходит возмущение, управление без обратной связи приводит к аварии. Джеймс Уатт решил эту проблему посредством регулятора (рис. 28), который состоит из двух тяжелых шаров, подвешенных на валу и вращающихся с той же скоростью, что и машина. Чем быстрее движется машина, тем больше сдвигаются шары под действием центробежной силы. При этом они тянут вверх муфту, связанную с рычагом, управляющим энергией, подводимой к машине. Система устроена так, что чем быстрее движется машина, тем больше раздвигаются шары и снижается уровень поступления энергии (или наоборот, чем медленнее движется машина, тем меньше отклоняются шары и тем выше поднимается регулятор пара). Можно автоматически компенсировать изменения нагрузки на машину, увеличивая или уменьшая поступление энергии, требуемой для поддержания необходимой скорости.
Рис. 1. Принцип действия ре-связанный гулятора Уатта с машиной
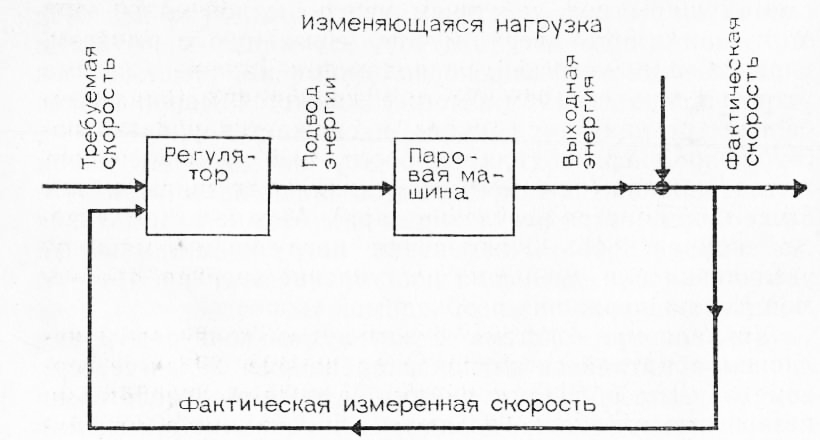
Управляемая система с замкнутым контуром и наличием обратной связи показана на рис. 2. Все сервомеханизмы обладают одними и теми же свойствами независимо от того, являются ли они чисто механическими устройствами, как регулятор Уатта, или электронными системами, используемыми в роботах. Эффект достигается за счет применения детектора рассогласования, возвращающего сигнал, который пропорционален различию требуемого значения параметра и фактической величины (которое отслеживается и отсылается обратно в систему, формируя, таким образом, замкнутую «петлю» в концептуальном процессе управления). Если обратная связь не используется, управляющий контур разомкнут, снижаются чувствительность и точность системы. На рис. 3 приводится обобщенная простая система управления с обратной связью, которая может применяться на каждом узле робота. Преобразователь воспринимает требуемое состояние (например, положение или скорость) и преобразует информацию в подходящую для системы автоматического регулирования форму (например, электрическое напряжение на выходе преобразователя прямо пропорционально положению узла). Сигнал обратной связи вычитается из входного сигнала (требуемое положение). Таким образом, создается сигнал рассогласования, который после усиления до необходимого уровня управляет исполнительной системой робота. Если же входной сигнал и сигнал обратной связи одинаковы, то сигнал рассогласования равен нулю, таким образом, состояние системы не меняется. Если два сигнала неодинаковы, то усиленный сигнал рассогласования будет управлять узлом, чтобы снова довести сигнал до нуля. На практике системы используют отрицательную обратную связь. Система, использующая положительную обратную связь, в которой сигнал рассогласования вынуждает систему функционировать так, что она дает еще больший по величине сигнал рассогласования, безусловно, неприемлема.
Рис. 2. Последовательность процесса обратной связи, используемой в регуляторе Уатта
Рис. 3. Обобщенная простая система управления с обратной связью
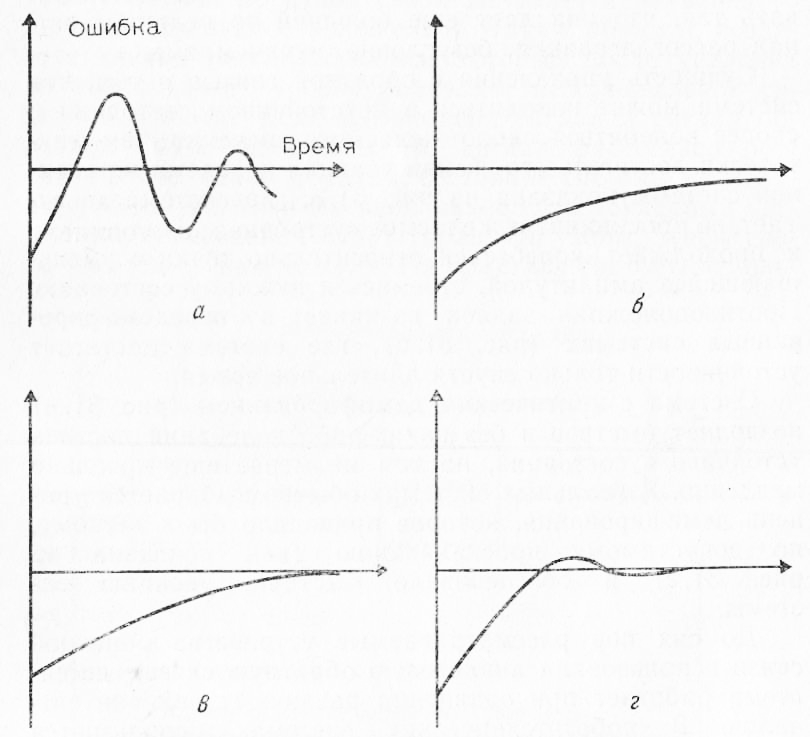
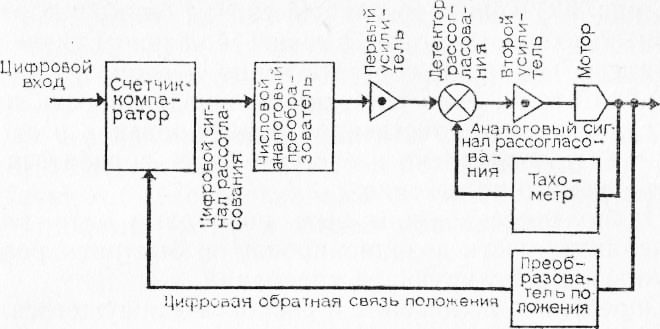
Сущность управления с обратной связью в том, что система может находиться в неустойчивом состоянии и скорее колебаться около желаемого значения, чем фактически достигать его. Такая реакция недодемпфирован-ной системы показана на рис. 4, а, где система достигает, но проскакивает желаемое «устойчивое состояние» и продолжает колебаться относительно точки с уменьшающейся амплитудой, стремясь к нужному состоянию. Противоположная задача возникает в передемпфированных системах (рис. 4,б), где система достигает устойчивости только спустя длительное время. Система с критическим демпфированием (рис. 4, в) позволяет быстрее и без каких-либо колебаний достичь устойчивого состояния, но тем не менее еще довольно медленно. В реальных системах обычно выбирается уровень демпфирования, которое приводило бы к легкому, но допустимому проскакиванию (как показано на рис. 4, г) и обеспечивало быструю реакцию системы. До сих пор рассматриваемые устройства обратной связи использовали аналоговую обратную связь, где система работает при сравнении различных величин сигналов. В робототехнических системах используется другой тип обратной связи, называемый цифровой обратной связью, где все сигналы представлены в форме двоичных импульсов. При аналоговой обратной связи информация о положении представляется величиной электрического напряжения, при цифровой обратной связи данные о положении передаются эквивалентно потоку дискретных электрических импульсов, цифровой компаратор сравнивает число импульсов обратной связи с первоначальным значением и дает сигнал рассогласования. Пример системы, включающей обратную связь по положению и скорости, показан на рис. 5. Система представляет собой сложное устройство обратной связи и включает управление как положением, так и скоростью. Во многих роботосистемах управление скоростью существенно, если для конечного позиционирования требуется поддерживать высокие уровни точности. В нашем примере системы автоматического регулирования управляются аналоговым электрическим напряжением.
Рис. 4. Различные формы реакции системы:
а — недодемпфированная; б —передемпфированная; в —критическое демпфиррва-ние; г — рациональное демпфирование
Рис. 5. Система, включающая обратную связь по положению и скорости
Таким образом, чтобы преобразовать импульсный сигнал рассогласования в аналоговое напряжение, прежде чем он будет усилен до последующей обработки, в схему включают аналогово-цифровой преобразователь (АЦП). В отличие от преобразователя положения, который выдает цифровой сигнал, преобразователь скорости (тахометр) показан как аналоговое устройство, и его сигнал, пропорциональный скорости движения узла, отсылается обратно для того, чтобы преобразовать существующий выходной сигнал от первого управляющего усилителя. Без контура обратной связи по скорости позиционная обратная связь фактически обеспечит контроль предельной скорости, так как чем сильнее сигнал рассогласования (соответствующий большому расстоянию между желаемой и фактической позициями), тем больше будет напряжение, управляющее силовой системой узла. Следовательно, если рука все больше и больше отстает от сигнала команды, то мотор, управляющий узлом, автоматически увеличит скорость. Однако такой контроль скорости обеспечивает относительно малую реакцию и его характеристики свойственны контролю позиционной обратной связи. Включение промежуточного контура обратной связи по скорости позволяет быстро корректировать изменения скорости и стабилизирует всю систему автоматического регулирования. Выбор каждого усилителя в системе с многими обратными связями сильно влияет на реакцию системы. Например, если коэффициент второго усилителя велик, то слабый сигнал ошибки обратной связи по скорости может вызвать большие изменения в сигнале к мотору и соответственно в скорости мотора. Подобно этому, если слишком велика мощность первого усилителя, то естественное демпфирование в системе может быть подавлено и система будет колебаться около требуемого положения. На практике должны быть подобраны оптимальные значения точности позиционирования, быстроты реакции и диапазон регулирующих колебаний. Определить положение и скорость движущегося узла можно либо по положению сервомотора, либо используя прямую обратную связь, когда преобразователь устанавливает именно положение движущегося узла. Легко заметить, что первый способ не дает точных данных из-за люфтов и мертвых ходов узла. Однако второй способ, являясь более точным, обходится дороже, поэтому часто используют непрямую обратную связь. Реклама:Читать далее:Позиционное управлениеСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|

|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|