|
|
Категория:
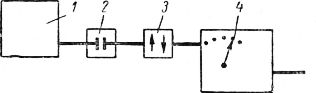
Металлорежущие станки Блок-схемы приводов. Привод, как правило, состоит из двигателя вращательного движения и той или иной механической передачи. В зависимости от сочетания различных видов двигателей и механических передач привод обеспечивает либо ступенчатое, либо бесступенчатое изменение чисел оборотов. Бесступенчатое изменение чисел оборотов может быть получено либо с помощью электропривода или гидропривода, либо с помощью механической бесступенчатой передачи, называемой вариатором. Ступенчатое изменение чисел оборотов может быть получено с помощью механической передачи, называемой коробкой скоростей в приводах главного движения и коробкой подач в приводах подачи, либо с помощью электропривода. При ступенчатом изменении чисел оборотов привод характеризуется числом ступеней. Чем больше число ступеней для заданного диапазона, тем меньше будет разница между настроенной скоростью резания и расчетной и тем меньше будут потери времени, вызванные снижением скорости резания. Однако увеличению числа ступеней ставит пределы усложнение конструкции привода. Во многих случаях для получения требующегося диапазона приходится сочетать в приводах различные методы изменения чисел оборотов. Наиболее распространенной формой является привод с односкорост-ным асинхронным электродвигателем и механической передачей для ступенчатого изменения чисел оборотов. Такой привод обладает жесткой характеристикой, так как асинхронный электродвигатель лишь незначительно изменяет свое число оборотов под нагрузкой и обеспечивает постоянство мощности во всем диапазоне скоростей.
Рис. 1. Блок-схема привода вращательного движения. При использовании многоскоростиого асинхронного электродвигателя механическая передача для ступенчатого изменения чисел оборотов может быть значительно упрощена при сохранении того же общего числа ступеней. Следует заметить, что с изменением числа оборотов электродвигателя мощность привода изменяется. Обычно применяются двух- или трехскоростные асинхронные электродвигатели.
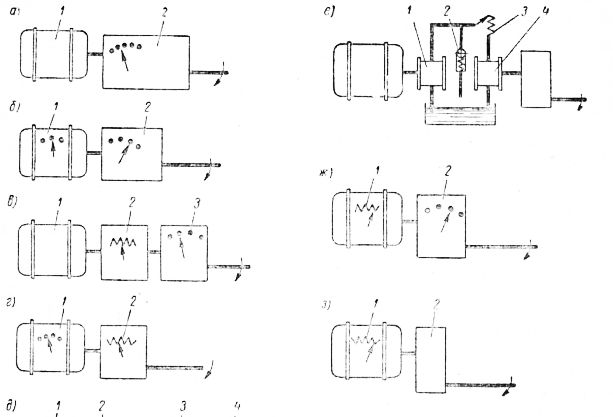
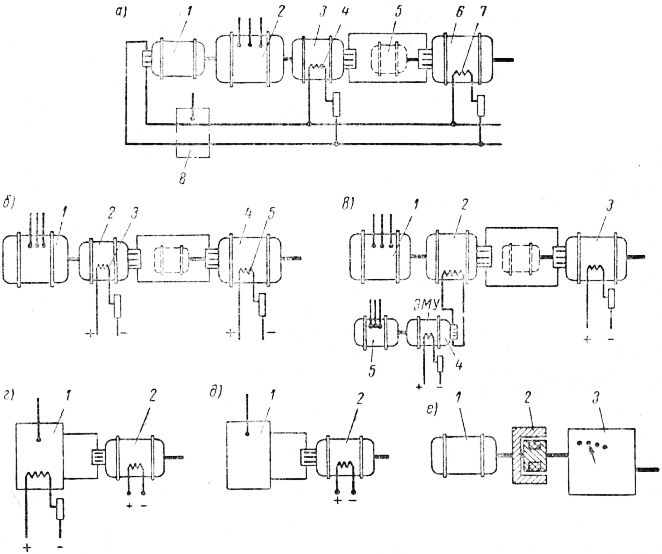
Рис. 2. Варианты блок-схем приводов вращательного движения. Приводы с асинхронными электродвигателями отличаются сравнительно высоким к. п. д. Для бесступенчатого изменения чисел оборотов в приводах с односко-ростным асинхронным электродвигателем может быть использована механическая бесступенчатая передача. Механические бесступенчатые передачи имеют сравнительно узкий диапазон изменения чисел оборотов. Для расширения диапазона последовательно с бесступенчатой передачей включается передача для ступенчатого изменения чисел оборотов. Внутри каждого интервала чисел оборотов, устанавливаемых с помощью передачи, можно получить любую скорость с помощью бесступенчатой передачи. Таким образом, во всем диапазоне достигается бесступенчатое изменение чисел оборотов. Возможен вариант сочетания многоскоростного асинхронного электродвигателя с бесступенчатой механической передачей, также обеспечивающий бесступенчатое изменение чисел оборотов во всем диапазоне. Несмотря на большое число конструкций механических бесступенчатых передач этот метод изменения чисел оборотов не получил значительного распространения. Диапазон изменения чисел оборотов с помощью механических бесступенчатых передач находится в пределах 4—12 и лишь у отдельных конструкций достигает. Мощность, передаваемая бесступенчатыми вариаторами, для большинства конструкций ограничена 2—4 кет, хотя отдельные конструкции позволяют передавать мощность свыше 20 кет. Мощность, передаваемая механическими бесступенчатыми вариаторами, зависит от настроенного числа оборотов. Обычно с уменьшением числа оборотов передаваемая мощность понижается. Наиболее удачные конструкции вариаторов обладают сравнительно жесткой характеристикой. Механические вариаторы применяются в основном на станках средних размеров: токарных, сверлильных, координатнорасточных, в приводах передних бабок кругло- и резьбошлифовальных станков. На токарных станках преимущественно используется вариант привода, представленный на рис. 2, б, на других станках, где требуется меньший диапазон изменения чисел оборотов, необходимость в ступенчатой передаче5отпадает. Еще меньшим распространением пользуется вариант с гидравлической бесступенчатой передачей, представленный на рис. 2. Привод включает асинхронный электродвигатель, регулируемый насос, который подает масло в регулируемый гидродвигатель, и механическую ступенчатую передачу. Изменение числа оборотов в минуту осуществляется изменением производительности насоса и пропускной способности гидродвигателя. Конструкции гидроприводов вращательного движения чрезвычайно многообразны. Диапазон изменения чисел оборотов достигает 30—50. В первой части диапазрна изменение чисел оборотов осуществляется изменением производительности насоса, при этом привод развивает постоянный крутящий момент, а мощность возрастает. Во второй части диапазона изменение чисел оборотов осуществляется с помощью гидродвигателя, при этом мощность остается постоянной, а момент падает. К. п. д. привода зависит от установленного числа оборотов и с повышением числа оборотов падает. Жесткость характеристики удовлетворяет условиям работы как в приводах главного рабочего движения, так и подачи. Гидропривод отличается значительной сложностью конструкции и сравнительно большими габаритами. Несмотря на то что первые модели станков с гидроприводом вращательного движения появились более тридцати лет тому назад, этот вид привода до сих пор не нашел широкого применения. Однако дальнейшее совершенствование конструкции гидроприводов и технологии их производства может создать более благоприятные условия для внедрения в эксплуатацию гидроприводов вращательного движения. В последнее время начинают получать распространение гидроприводы вращательного движения с дроссельным бесступенчатым регулированием, которые находят применение в механизмах подач, в следящих системах, в зажимных устройствах. Гидропривод состоит из нерегулируемого насоса и нерегулируемого гидродвигателя. К гидродвигателю масло поступает через регулируемое гидравлическое сопротивление 3. В зависимости от настроенной величины сопротивления к гидродвигателю поступает в единицу времени большее или меньшее количество масла, что приводит к изменению числа оборотов гидродвигателя. Избыток масла, подаваемого насосом, сливается через клапан 2 в бак. Гидропривод этого типа имеет широкий диапазон изменения чисел оборотов, достигающий 70—100 и более. При использовании соответствующей аппаратуры характеристика привода является достаточно жесткой. К. п. д. привода при малых скоростях низкий. Привод отличается сравнительно простой конструкцией, что создает благоприятные перспективы для его распространения в станках, особенно в системах автоматического управления. При использовании в приводах электродвигателей с бесступенчатым изменением чисел оборотов структура привода зависит от диапазона изменения чисел оборотов двигателя. При небольшом диапазоне привод включает кроме электродвигателя также механическую ступенчато-регулируемую передачу. При большем диапазоне изменения чисел оборотов электродвигателя вращение от электродвигателя передается через постоянную механическую передачу. Блок-схемы электроприводов для бесступенчатого изменения чисел оборотов. Системы бесступенчатого изменения чисел оборотов электродвигателя весьма многообразны. Этот вопрос подробно рассматривается в курсе электрооборудования станков. Мы остановимся только на некоторых принципиальных блок-схемах. В приводах станков для бесступенчатого изменения скорости в основном используются электродвигатели постоянного тока.. Наиболее простое решение получается при использовании электродвигателя постоянного тока, питающегося от соответствующей заводской сети. Изменение числа оборотов достигается изменением напряжения в обмотках возбуждения. Диапазон изменения чисел оборотов равен, у специальных конструкций он достигает 6—8. Отечественные предприятия обычно не располагают сетью постоянного тока, поэтому данное решение находит ограниченное применение. При отсутствии сети постоянного тока электропривод включает также собственный источник питания. Одним из характерных вариантов является система генератор — двигатель. Исполнительный электродвигатель 6 получает питание от генератора, который приводится во вращение асинхронным электродвигателем. Изменение числа оборотов электродвигателя осуществляется изменением напряжения в цепи якоря или тока в обмотке возбуждения. Для изменения напряжения в цепи якоря изменяется ток в обмотке возбуждения генератора. Для питания обмоток возбуждения используется либо специальный генератор (возбудитель), получающий вращение от того же асинхронного электродвигателя, либо выпрямитель, питающийся от сети. Для поддержания стабильности работы электропривода генератор может иметь ряд дополнительных обмоток, получающих питание от тех или иных элементов системы, реагирующих на отклонение системы от заданного режима работы. Изменение напряжения на дополнительных обмотках поддерживает постоянство заданного режима. В частности для поддержания постоянства заданного числа оборотов используется тахогенератор, связанный с исполнительным электродвигателем. При изменении числа оборотов электродвигателя 6 изменяется напряжение, подаваемое тахогенератором в обмотки возбуждения генератора. Дополнительные обмотки могут быть также использованы для управления приводом в процессе разгона, торможения и т. п. Система генератор — двигатель обычно имеет диапазон изменения скорости 10—40. В той части диапазона, в которой изменение скорости достигается изменением напряжения в цепи якоря, система обеспечивает получение постоянного момента; во второй части диапазона, в которой изменение числа оборотов достигается изменением тока возбуждения, система работает с постоянной мощностью. Система имеет сравнительно низкий к. п. д. порядка 0,6—0,7. Стоимость системы в 7—8 раз превышает стоимость асинхронного электродвигателя той же мощности. При использовании в системе генератор — двигатель электромашинного усилителя диапазон изменения скорости может быть значительно расширен. В практике станкостроения применяются электроприводы с электромашинным усилителем с диапазоном изменения скоростей до 2000. На схеме, представленной на рис. 3, б, асинхронный электродвигатель приводит во вращение электромашинный усилитель (ЭМУ), представляющий собой генератор специальной конструкции, от которого питается исполнительный электродвигатель постоянного тока. Электромашинный усилитель кроме основной обмотки возбуждения имеет ряд дополнительных обмоток для стабилизации режима работы системы и управления. Изменение числа оборотов достигается изменением напряжения в цепи якоря и тока возбуждения в обмотке.
Рис. 3. Блок-схемы электроприводов. На схеме, представленной на рис. 3, б, асинхронный электродвигатель приводит во вращение генератор, питающий исполнительный электродвигатель. Электромашинный усилитель, получающий вращение от электродвигателя, используется для питания обмоток возбуждения генератора. В этом случае мощность электромашинного усилителя может быть очень небольшой. Преимуществом приводов с электромашинными усилителями является широкий диапазон изменения чисел оборотов и возможность управления режимом работы, недостатком — высокая стоимость, сравнительно низкий к. п. д. Система генератор — двигатель в той или иной форме находит преимущественное применение на тяжелых станках: токарных, карусельных, про-дольнострогальных. На продольнострогальных станках, где требующийся диапазон сравнительно невелик и обычно не превышает 15, используется схема, представленная на рис. 2, з; в других случаях большее распространение имеет схема представленная на рис. 2, ж, так как использование схемы, представленной на рис. 2, з, приводит к значительному увеличению мощности электродвигателя посравнению с требующейся. Система генератор —двигатель с электромашинным усилителем при широком диапазоне изменения чисел оборотов применяется в приводах подач некоторых станков, в частности расточных, где требуется широкий диапазон минутных подач при независимом приводе подач. В последнее время начинают получать распространение приводы с электродвигателем постоянного тока и магнитным усилителем. Магнитный усилитель позволяет изменять напряжение в цепи якоря электродвигателя постоянного тока. Достоинством магнитного усилителя является отсутствие каких-либо движущихся частей и элементов с низкой долговечностью. Серийно выпускаемые приводы, мощностью 0,1 до 4,0 кет, имеют диапазон изменения чисел оборотов и к. п. д. около 0,5. Эти приводы находят применение в механизмах подач различных станков: фрезерных, шлифовальных и др. Двигатель постоянного тока может получать также питание от управляемого выпрямителя, в котором для питания цепи якоря используются тиратроны. Приводы этого типа получили название ионных. К их числу относится привод ЭЛИР, разработанный ЭНИМС. Диапазон регулирования достигает 100—120. К. п. д. ионных приводов сравнительно низкий. К числу недостатков относится также ограниченный срок службы. Для бесступенчатого изменения скорости может быть также использована электромагнитная муфта скольжения, передающая вращение от односкоростного электродвигателя к механической ступенчатой передаче. Изменение числа оборотов достигается изменением тока возбуждения муфты. Диапазон изменения находится в пределах 5—8. Достаточно жесткая характеристика может быть получена только при наличии дополнительных стабилизирующих элементов в схеме. К. п. д. привода низкий. Данная система привода не нашла значительного распространения в станках, так как она уступает другим системам электрического изменения чисел оборотов. Импульсные приводы. При рассмотрении типов приводов необходимо также упомянуть об импульсных приводах. При импульсных приводах ведущий вал привода периодически, в нужный момент поворачивается на определенный угол. В качестве импульсных приводов широко используются различные храповые механизмы, которые применяются для периодической подачи рабочих органов станков. Конструктивные формы таких механизмов весьма многообразны. Величина подачи изменяется путем изменения угла поворота ведущего вала. К числу импульсных приводов могут быть также отнесены шаговые электродвигатели. При получении импульса тока ротор шагового электродвигателя поворачивается на небольшой угол, например на 1 : 108 часть окружности. При этом поворот осуществляется с высокой точностью. Скорость перемещения определяется частотой поступления импульсов. Так как даже при малых скоростях импульсы поступают с высокой частотой, то движение практически является непрерывным. Шаговые двигатели получают распространение в станках с цифровым программным управлением для точных установочных и рабочих перемещений и для обработки контурно- и пространственносЛожных поверхностей. Число и частота импульсов задаются программой. Связь электродвигателя с механическими передачами привода. Ведущий вал механической передачи может получать движение от электродвигателя либо через ременную, либо через зубчатую передачи, либо ведущий вал может быть непосредственно связан с электродвигателем.
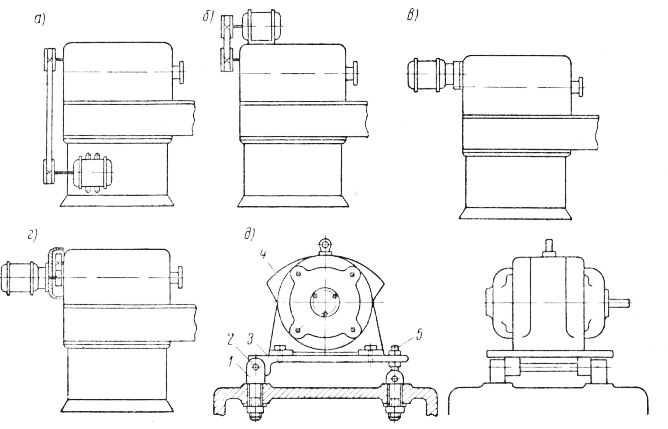
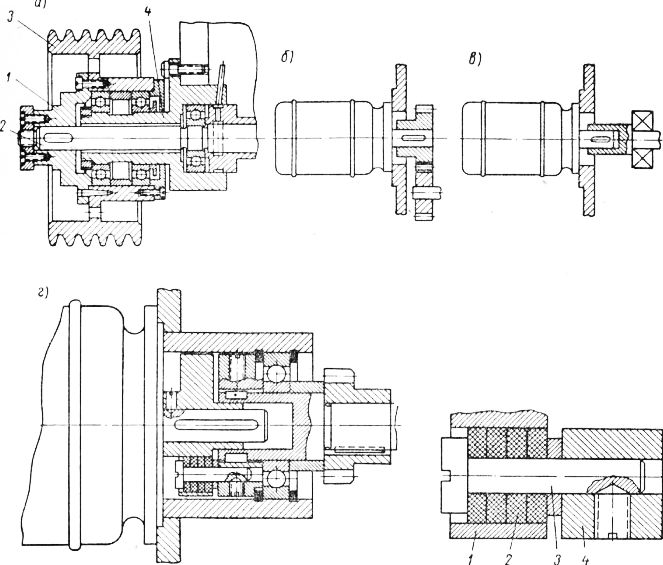
Рис. 4. Схемы передач от электродвигателя к ведущему валу привода. При ременной передаче электродвигатель может быть размещен как в нижней части станка, что способствует уменьшению вибраций, так и в непосредственной близости от рабочего органа. Натяжение ременной передачи осуществляется обычными методами: перемещением электродвигателя на салазках, с помощью натяжных роликов и качающейся плиты, на которой устанавливается электродвигатель. Последний вариант благодаря компактности и простоте конструкции, а также удобству натяжения находит значительное применение в станках. Электродвигатель устанавливается на плите, которая может поворачиваться относительно оси, закрепленной в отверстиях двух стоек. Натяжение ремня осуществляется поворотом плиты с помощью гаек шарнирного болта, заходящего в прорезь плиты. Для уменьшения деформаций ведущего вала последний в ряде случаев разгружают от усилий натяжения ременной передачи. Ведомый шкив монтируется на подшипниках на втулке, прикрепленной к корпусу, которая и воспринимает натяжение ременной передачи. Вращение от шкива передается валу через фланец. При зубчатой передаче ведущая шестерня закрепляется непосредственно на конце вала электродвигателя. Недостатком такого варианта является возможная перегрузка подшипника электродвигателя при малом диаметре шестерни. При непосредственном соединении вала электродвигателя с ведущим валом механической передачи возможно применение различных муфт. Простейшим методом соединения является использование в качестве соединительной муфты конца ведущего вала, в отверстие которого входит вал электродвигателя. Некоторым недостатком подобного соединения является трудоемкость обеспечения строгой соосности валов, необходимой в данном случае.
Рис. 5. Конструктивное оформление элементов передач от электродвигателя к ведущему валу привода. Один из весьма компактных вариантов соединительной муфты, который находит распространение в станках, представлен на рис. 5, г. На полом конце ведущего вала закреплен диск с пальцами, которые через упругие втулки связаны с диском, закрепленным на валу электродвигателя. При непосредственном соединении вала электродвигателя с ведущим валом механической передачи в большинстве случаев используются фланцевые электродвигатели, а в некоторых конструкциях — электродвигатели, встроенные в корпус соответствующего узла станка. Реклама:Читать далее:Схемы передачи движения к подвижным рабочим органамСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|