|
|
Категория:
Роботы в промышленности Далее: Роботы с руками Подаваемые заготовки. Поскольку роботы все больше используются в сложных системах для обработки или сборки деталей, необходимо разобраться в методах подачи заготовок роботу. Методы подачи заготовок роботу основаны на традиционных инженерных подходах.
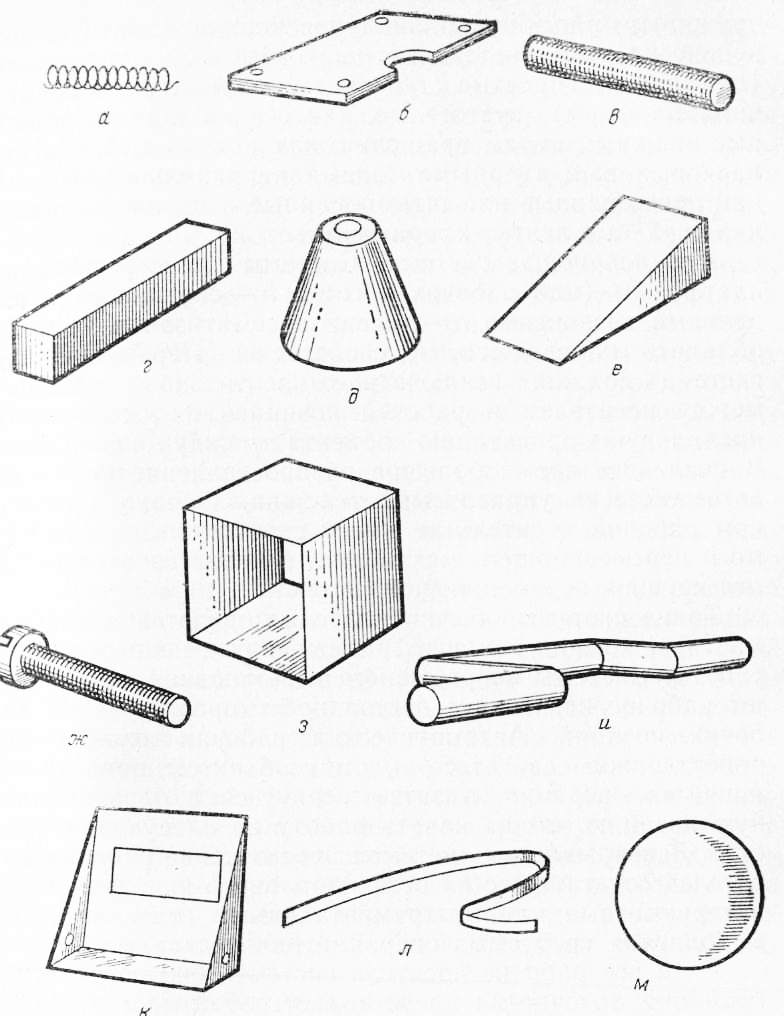
Рис. 1. Классы различных форм деталей:
а —сцепленная; б— плоская; в —цилиндрическая; г —призматическая; д — коническая; е—пирамидальная; ж—с головкой; э —полая; u — сложного вращения: к—неправильной формы; л—длинная; л—сферическая
Чтобы такие устройства удовлетворяли всем требованиям, следует выбрать метод для конкретной заготовки. На рис. 41 представлены различные формы деталей. Детали могут быть сцепленные, как спиральные которые ликвидируются только тогда, когда требуется деталь. Хотя автобункер требует точной регулировки скорости подачи деталей роботу, так как она может значительно опережать быстродействие робота, и более подходит для жесткой автоматизации, он по-прежнему широко распространен. В вибробункерах по внутренней поверхности пологой чаши проложена специальная дорожка. Чаша вибрирует с помощью электромагнита, а помещенные детали медленно поднимаются по спусковой дорожке к выпускному отверстию в верхней части. Преимуществом таких питателей является сравнительная легкость, с которой ориентирующие устройства могут включаться в емкость. На специальных дорожках вибробункеров сделаны сужения и отсекатели, которые позволяют пропускать только правильно ориентированные детали. В пассивно ориентирующих устройствах детали, не имеющие желаемой ориентации, возвращаются обратно в чашу. Активно ориентирующие устройства имеют специальные каналы для переориентации детали. Они производительнее пассивных. Питающие устройства менее гибки, чем роботы, использующиеся для загрузки. Кроме того, стоимость таких загрузочных устройств относительно велика из-за часто ненужного запаса скорости подачи. В Салфорд-ском университете (Великобритания) делаются попытки автоматизированного проектирования загрузочных устройств с помощью системы КАД/КАМ, когда они создаются непосредственно исходя из быстродействия робота и конфигурации изделия. Для ориентации без специальной обработки используются универсальные бункерные устройства с распознающей системой, которая может определить форму, положение и ориентацию детали, а затем либо отвернуть неверно ориентированные детали, либо нацелить активно ориентирующую систему на правильную ориентацию детали. Такие системы более гибки, хотя и дороги, и могут использоваться для быстрой загрузки различных магазинов разнообразными деталями, при этом для удовлетворения требований роботосистемы необходим только один питатель, в противном случае потребовалось бы столько различных питателей, сколько используется деталей. В специально программируемых питателях инструменты отбираются автоматически компьютером. Реклама:Читать далее:Роботы с рукамиСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|