|
|
Категория:
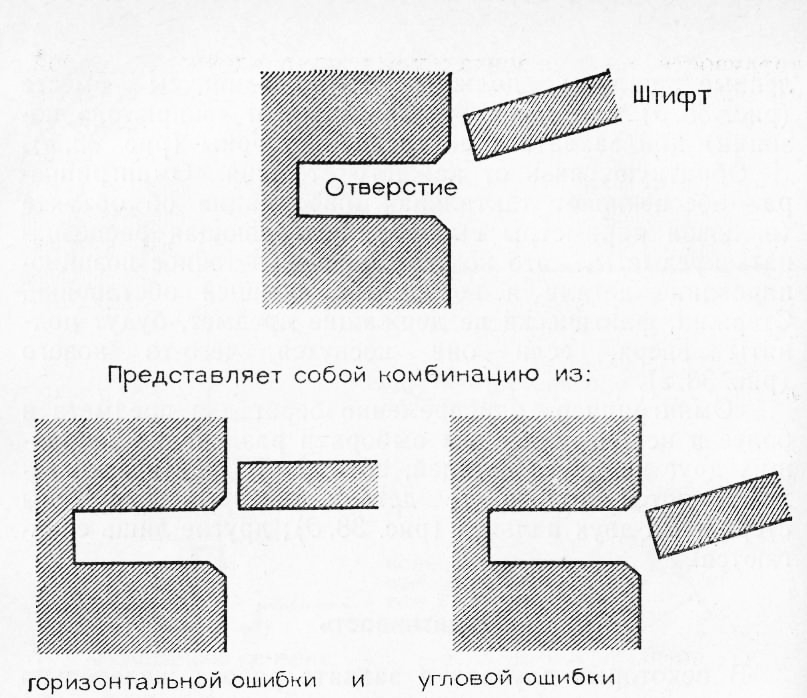
Роботы в промышленности Далее: Инструменты и датчики В некоторых случаях в захвате робота желательно сделать «зазор» (или податливость), который мог бы быть полезным при небольших отклонениях в позиционировании деталей. На рис. 39 приведены ошибки позиционирования при помещении предмета типа штифта в отверстие. В нашем примере поперечные ошибки могут привести к тому, что штифт пройдет мимо отверстия. Но если штифт начал движение и его цель — попасть в отверстие, то угловые ошибки вызывают либо заклинивание, либо большие контактные силы. Если штифт захвачен достаточно податливо, то небольшие боковые смещения осей можно скорректировать и по скошенной кромке «привести» штифт к отверстию. Некоторые робототехнические системы используют активную податливость, где сенсорная обратная связь (почти всегда по силе) используется для уменьшения боковых и угловых ошибок путем принуждения захвата выполнять компенсирующие движения. Силовые датчики для такой активной податливости обычно размещаются в самом захвате, в некоторых конструкциях они включаются в узлы робота. Скорость, с которой реагируют все системы, зависит от величины допустимой контактной силы. В настоящее время ведется большая работа по созданию пассивной податливости с использованием чисто механических решений проблемы.
Рис. 1. Ошибки позиционирования — комбинация горизонтальных и угловых ошибок
Неправильное представление связано с верой в то, что всегда достаточно только использовать присущую податливость «небрежной» руки робота. Это иногда имеет место, но такая конструктивная податливость не всегда годится. Представьте себе штифт, который по угловым координатам сцентрирован на отверстие, но слегка отходит от центра. Если штифт удерживается «свободно», то при спуске он попадет на скошенную кромку, создав момент, который не позволит штифту выравнивать угловые параметры. Если все-таки он входит в отверстие, то происходит защемление (которое можно снять путем смены направления приложенной силы и момента) или заклинивание (которое можно снять, вытащив штифт и снова его вставив). Фактически требуемая податливость скорректировала бы боковую ошибку без угловой. Роботы типа «СКАРА» пригодны для выполнения вставок в сборочных работах, поскольку они обладают большой боковой конструктивной податливостью при малой угловой податливости по горизонтальному направлению и малой боковой (хотя высокой угловой) податливостью в вертикальном направлении. Конечно, такие конструкции не смогут справиться с горизонтальными угловыми ошибками с таким же успехом, как с боковыми. В этих случаях используют механические многоосевые «поплавки», известные как устройства податливости удаленного центра, показанные схематично на рис. 40. Они прикрепляются к любому запястью робота, как платформа для самого захвата. Эти устройства спроектированы таким образом, что любая угловая ошибка создает момент, который заставляет одну часть устройства поворачиваться около удаленного центра (обычно размещенного на самом удаленном конце от захвата, удерживающего предмет), но не вызывает бокового движения. Отдельная секция устройства позволяет первой секции двигаться независимо в горизонтальном направлении без вращения заготовки. Такое устройство имеет те же характеристики позиционирования, что и в случае, когда штифт вытаскивается, а не вставляется в отверстие. Уже создано много вариантов таких устройств: от приспособлений, использующих пружинные рычаги, до пневматических трубопроводов, обеспечивающих нужную ответную реакцию. В конструкциях используются минимальные силы для того, чтобы достичь плотного соединения (особенно полезного в сборочных работах), они допускают большее разнообразие допусков деталей и сокращение остановок машин из-за защемления и заклинивания. Можно осуществлять вставки с намного более высокими допусками, боковые отклонения могут быть столь же большими, что и примененная скошенная кромка, и даже могут быть произведены прессовые посадки, при которых используемый деформирующийся штифт имеет диаметр больше, чем отверстие, в которое он будет вставлен.
Рис. 2. Принцип действия устройства податливости удаленного центра
Реклама:Читать далее:Инструменты и датчикиСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|

|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|