|
|
Категория:
Сварка металлов Промышленный робот представляет собой автоматическое устройство с программным управлением, быстро переналаживаемое для выполнения различных операций, обычно его рабочим органом является механическая ручка с тремя — шестью степенями свободы, т. е. количеством допускаемых независимых перемещений (продольных, поперечных, вращательных, угловых и т. п.). Робот-манипулятор является универсальным устройством и может использоваться в различных производственных линиях в отличие от традиционных автоматических манипуляторов, которые разрабатывают и изготовляют применительно к одной конкретной производственной установке. В сварочном производстве нашли преимущественно применение роботы, перемещающие сварочные клещи для контактной точечной сварки. Это связано с более низкими требованиями к перемещению клещей между точками при контактной сварке по сравнению с перемещением электрододержателя или горелки в процессе дуговой сварки. Роботы, предназначенные для дуговой сварки, должны осуществлять непрерывное движение электрода при регулируемых величинах перемещения, скорости и ускорения. Это усложняет его конструкцию и требует значительно большего объема памяти программирующих устройств. Робот, изображенный на рис. 1, используют в качестве носителя сварочных клещей для контактной сварки в автомобильной промышленности. В запоминающее устройство робота вводят программу. Программирование выполняет вручную оператор, который на первом экземпляре изделия с помощью пульта управления осуществляет необходимую последовательность перемещений сварочных клещей и выполнение сварки всех точек. Положение каждой свариваемой точки на рабочем пути фиксируется в программе. Вся программа начинает действовать по сигналу о том, что изделие заняло заданное положение относительно робота, после чего робот в соответствии с заложенной программой производит необходимые манипуляции. Одним из основных преимуществ роботов наряду с автоматизацией процесса является возможность легкой и быстрой смены программы в зависимости от свариваемого изделия.
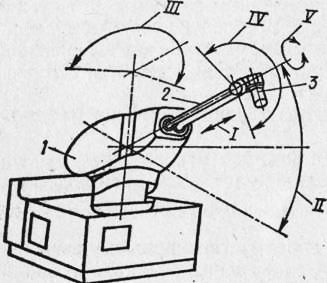
Рис. 1. Схема исполнительных механизмов робота:
1 — корпус, 2 — рука, 3 — запястье; 1 — вытягивание — втягивание, II — подъем — опускание, III — поворот, IV — изгиб, V — вращение
В целом применение роботов наиболее целесообразно в мелко-и среднесерийном производстве. В массовом производстве более целесообразны специализированные автоматические установки ввиду их большей производительности, например многоточечные контактные машины при большом объеме сварки. В единичном производстве рациональнее применение ручного управления сварочным процессом. Существенным недостатком роботов первого поколения является требование высокой точности сборки свариваемых деталей и их расположения в рабочем пространстве робота. В настоящее время создаются сварочные роботы второго поколения с системами обратной связи, с помощью которых рабочая программа и манипуляции робота будут автоматически корректироваться при изменении положения изделия или его отдельных элементов. Такие роботы, оборудованные специальными датчиками, смогут, например, обеспечить автоматический обход встречающихся на пути элементов зажимных приспособлений. Наряду с совершенствованием обычных промышленных роботов создаются роботы, действующие в экстремальных (сложных, труднодоступных, опасных для человека) условиях — в агрессивных средах, под водой, в космосе. Реклама:Читать далее:Основные дефекты сварных соединений и классификация методов их контроляСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|