|
|
Категория:
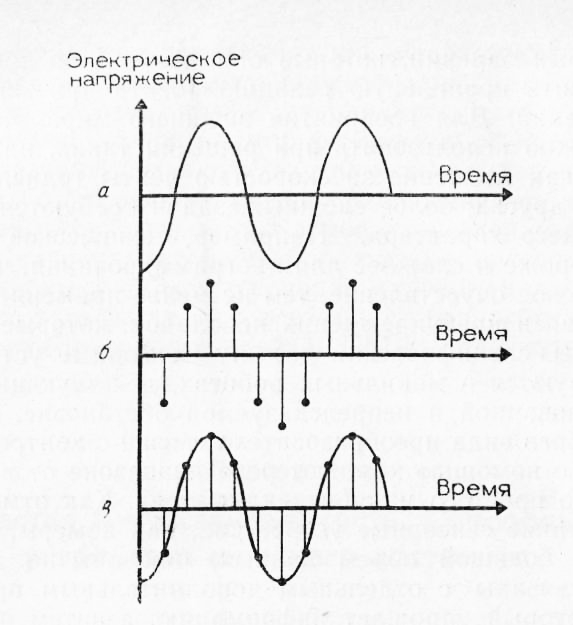
Роботы в промышленности Далее: Осязание В течение короткого промежутка времени роботы стали обладать органами чувств, на развитие которых у человека ушли миллионы лет. Органы чувств робота не могут пока состязаться с органами человека, но зачаточные, эквивалентные человеческому зрению, осязанию и слуху стали привычными. Например, обоняние используется для обнаружения утечек в корпусах автомобилей. В этой главе мы рассмотрим сенсорные устройства внешнего состояния, от которых робот получает информацию об окружающей среде. Подключение внешних датчиков в робототехническую систему позволило квалифицировать ее как робот второго поколения. Роботы первого поколения имеют только датчики внутреннего состояния, например шифратор для определения положений узлов робота. Такое устройство (с помощью которого человек ощущает положение тела) не дает информации об окружающей робота обстановке, и этим робот первого поколения отличается от робота второго поколения. Специфические сенсорные устройства включаются в конструкцию робота и позволяют выполнять специфические задачи. Такие датчики настроены на регистрацию некоторых явлений, которые они должны воспринять и обеспечить правильную реакцию робота при минимуме вычислений. Для восприятия внешнего мира этот подход можно использовать при решении таких, например, задач, как слежение за скоростью ленты транспортера, но для других, более сложных, задач требуются датчики общего характера. Например, техническое зрение, хотя дороже и сложнее для программирования, чем специфическое очувствление, тем не менее применяется для слежения и предупреждения неполадок, которые пропустил бы специфический датчик. Сенсорные устройства используются в мобильных роботах, действующих в неорганизованной и непредсказуемой обстановке. Любого вида преобразователь связан с контроллером робота с помощью компьютера в диапазоне от видеокамеры до простого микропереключателя. Как отмечалось выше, такие сенсорные устройства, как камеры, обеспечивают большой объем данных, они обычно должны быть связаны с отдельным дополнительным процессором, который упрощает информацию, а затем передает ее контроллеру робота. Устройства, сочетающие стадию очувствления и предварительную обработку данных и таким образом снабжающие нужной информацией, относят к быстродействующим сенсорным устройствам. Более простые датчики связаны непосредственно с компьютером, управляющим роботом, и если процессор обладает достаточным быстродействием, то большое число таких датчиков фактически может обслуживаться одним компьютером. Способность одного компьютера следить за несколькими датчиками основана на методе, известном как мультиплексирование. Представьте аналоговый преобразователь, который дает сигнал между 1 и 2 Гц, возникающий, например, при измерении вибрации. Выходное напряжение от датчика изменяется по определенному закону. Поэтому компьютеру не нужно следить эа ним. В определенные мгновения он отбирает значения напряжения, затем выполняет другую задачу (как при псевдопараллельной обработке данных) и снова отбирает напряжение до того, как оно радикально изменится. Путем интерполяции между различными отобранными значениями выходного напряжения можно с помощью компьютера восстановить полный сигнал так, как если бы он наблюдался непрерывно. Теоретически сигнал необходимо отобрать на удвоенной максимальной частоте, которая может быть на выходе с преобразователя. В нашем примере выходной сигнал с датчика нужно мгновенно регистрировать каждую четверть секунды.
Рис. 1. Принцип многократного отбора выходного сигнала:
а — сигнал выходного напряжения; б—отобранные мгновенные значения напряжений (в данном случае за период сигнала выбраны 6 точек); в — реконструированный сигнал
Чтобы получить точное значение, время, требуемое для снятия и сохранения амплитуды сигнала, должно быть минимальным. При этом следует применять различные методы, которые могут быстро «удерживать» значение выходного сигнала для последующей обработки. Несомненно, что использование таких методов сбора данных высвобождает время, в течение которого компьютер может управлять роботом или следить за другими датчиками. Для формирования данных обрабатывают сигналы аналоговых датчиков. Чтобы повысить значение сигнала, его пропускают через предварительный усилитель, или вентиль (оптический), или трансформатор для низких частот, электронные фильтры, аналоговый линеари-затор (чтобы компенсировать нелинейные характеристики используемого датчика) и, наконец, через аналогово-цифровой преобразователь (АЦП). АЦП может передавать несколько сигналов по одному каналу, используя при этом быстрое переключение или различные полосы частот между несколькими различными преобразователями. Предварительная обработка сигнала, состоящая из аналоговой фильтрации и линеаризации, может быть заменена на обратный процесс использования эквивалентов цифровой схемы после прохождения через АЦП. АЦП, как и схемы последующей обработки, можно заменить программой, входящей в программное обеспечение. Управление роботом заключается в слежении за несколькими различными преобразователями с тем, чтобы обнаружить, изменился ли какой-либо выходной сигнал. Этого можно достичь одним из двух основных способов. Первый способ — последовательно осуществляют проверку с помощью контроллера с целью узнать, зарегистрировал ли он что-либо. Если нет, то контроллер переходит на следующий датчик, если да, то выполняется соответствующее действие. Датчики, более склонные к изменениям, проверяют чаще. Но при проверке всегда существует опасность того, что изменение произойдет после проверки и, следовательно, изменение (даже важное) не будет зарегистрировано до тех пор, пока контроллер не проверит остальные датчики. Второй способ-—прерывающий, когда процессор не следит за датчиком, пока не будет получен прерывающий сигнал, указывающий на изменение его показаний. Затем процессор выполняет программу проверки с целью обнаружить, какой датчик вызвал прерывание. Этот способ применяется, когда от датчиков идут только случайные сигналы, так как компьютер не связан постоянным слежением за ними и может использоваться для других целей до получения сигнала о прерывании. Проведя классификацию прерывающих сигналов от различных датчиков по степени важности, возможно сделать так, чтобы такой важный датчик, как детектор столкновения, прерывал информацию от всех других датчиков и нацеливал контроллер на обслуживание этого прерывания, отдавая ему предпочтение перед другими, даже если какой-либо другой датчик уже обслуживается. Для всех систем, обладающих многими сенсорными устройствами, необходимо «взвешивать» реакции различных датчиков, если они входят в противоречие друг с другом. Например, в мобильном роботе один датчик мог бы оповестить об обнаружении им на пути робота крупного объекта, в то время как другой (датчик другого типа) ничего не обнаружил. Реклама:Читать далее:ОсязаниеСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|