|
|
Категория:
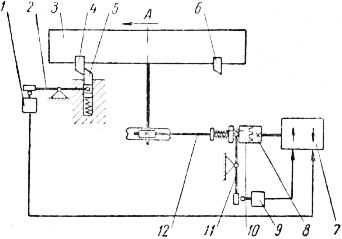
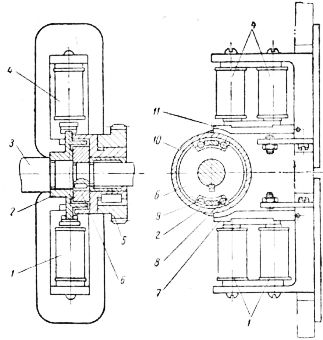
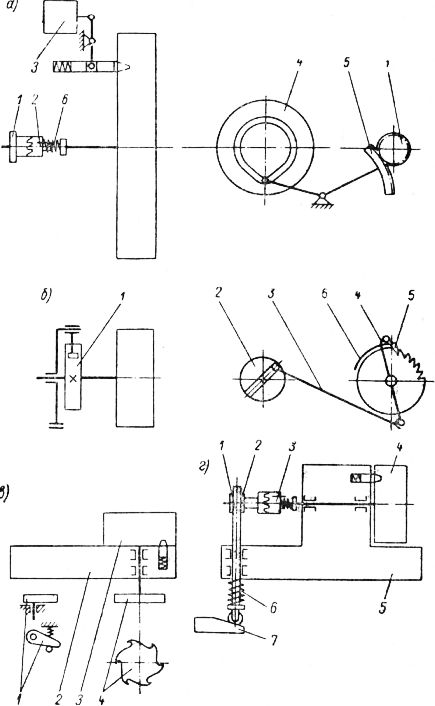
Металлорежущие станки Далее: Фиксирующие механизмы Периодически включаемый реверсивный привод. Рабочий орган периодически поворачивается в направлении стрелки А на точно фиксированный угол. При повороте рабочий орган получает движение от периодически включаемого реверсивного привода. Положение рабочего органа определяется жестким неподвижным упором, к которому прижат ограничитель хода рабочего органа. При повороте движение передается от раверсивного привода через самовыключающуюся муфту валу червячной передачи. При повороте рабочего органа следующий ограничитель хода 6 в конце поворота утапливает жесткий упор. После того как ограничитель пройдет мимо упора, последний возвращается в исходное положение. При этом рычаг воздействует на конечный выключатель, который подает сигнал реверсивному приводу. Направление вращения рабочего органа изменяется, и ограничитель хода прижимается к жесткому упору. Усилие прижима ограничивается самовыключающейся муфтой. При возрастании усилия подвижная муфта, сцепляющаяся с муфтой, отжимается влево, воздействуя через рычаг на конечный выключатель, который подает сигнал для выключения реверсивного привода. Самовыключающаяся муфта может быть выполнена в одном из рассмотренных выше конструктивных вариантов. В качестве реверсивного привода наиболее удобен реверсивный электродвигатель. Подобные реверсивные периодически включаемые приводы используются для поворота многопозиционных столов агрегатных станков. Значительные динамические нагрузки, возникающие в момент останова стола, приводят к потере точности. Для устранения указанного недостатка применяют приводы с двумя двигателями. Приводы с однооборртной муфтой. Периодически поворачивающийся рабочий орган получает движение от вала, который с помощью однооборотной муфты сцепляется с шестерней, получающей непрерывное вращение от привода. Муфта удерживается в выключенном состоянии защелкой и стремится под действием пружины сцепиться с шестерней. При поступлении сигнала управления привод опускает защелку и муфта сцепляется с шестерней. Сделав один оборот, муфта автоматически расцепляется. Угол поворота рабочего органа за один оборот муфты зависит от передаточного отношения передачи, связывающей валы. Для точной фиксации положения рабочего органа используется фиксатор с приводом, работающим синхронно с приводом 8 включения одноооборотной муфты.
Рис. 1. Периодически включающийся привод.
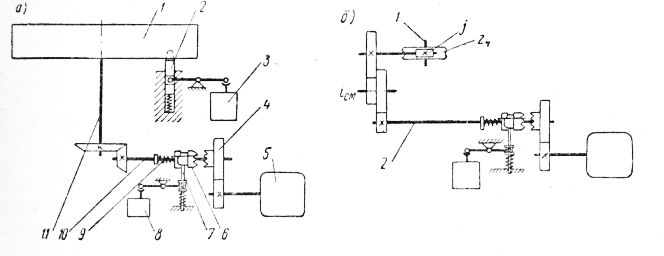
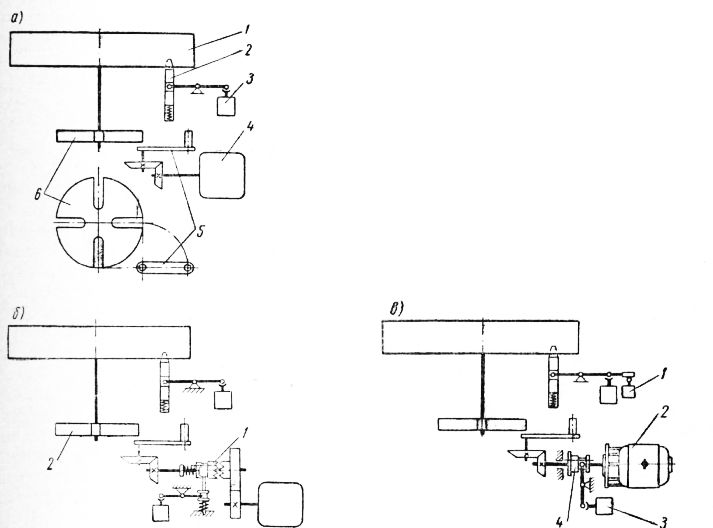
Рис. 2. Приводы с однооборотными муфтами. Преобразуя вращение вала в прямолинейное движение, можно получить ряд линейных перемещений рабочего органа с равными интервалами. Используя дополнительные механизмы или соответствующую схему управления, можно с помощью однооборотной муфты получить любое целое число оборотов. С валом однооборотной муфты через шестерни связан кулачок. Кулачок делает один оборот при двух, трех оборотах муфты. После включения однооборотной муфты кулачок запирает рычаг и не дает возможности защелке встать на место.
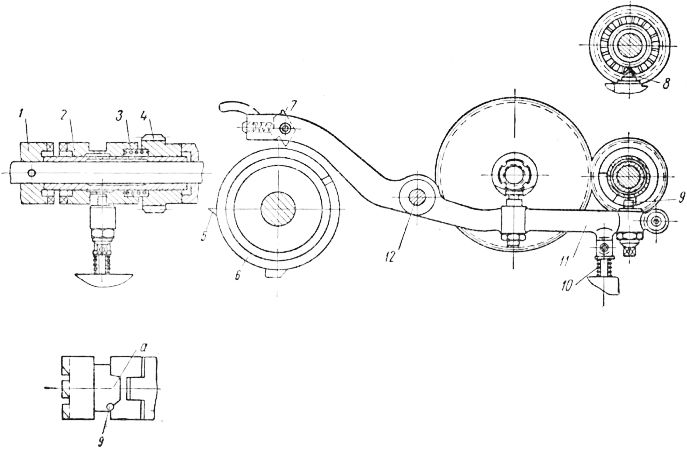
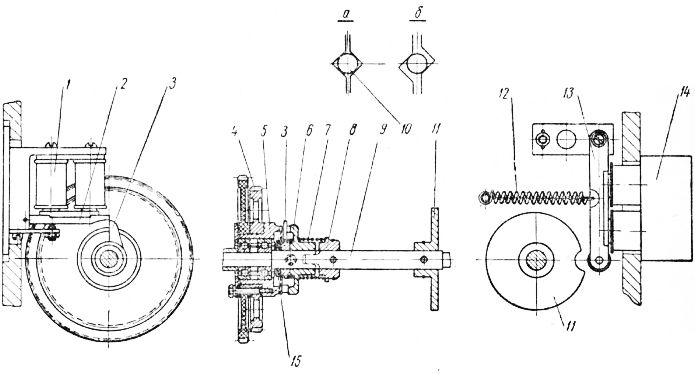
Рис. 3. Однооборотная кулачковая муфта. Если однооборотная муфта должна сделать большее число оборотов, то применяется специальная схема управления. Отдатчика, установленного на валу однооборотной муфты, поступают сигналы, следующие после каждого оборота. Когда число сигналов станет равно заданному числу оборотов, схема управления вырабатывает сигнал, поступающий к приводу управления защелкой. Подобная схема управления, которая будет рассмотрена ниже, позволяет задавать однооборотной муфте любое целое число оборотов. Широким распространением пользуется в станкостроении однооборотная кулачковая муфта, представленная на рис. 3. Периодическое вращение сообщается шестерне, которая сцепляется однооборотной муфтой с непрерывно вращающимся валом. Шестерня свободно сидит на валу и связана скользящими торцовыми поводками с кулачковой муфтой, также свободно сидящей на валу. Муфта под действием пружины стремится сместиться влево и сцепиться с муфтой, связанной с валом. Муфта удерживается в выключенном состоянии пальцем, который входит в углебление торцовой стенки канавки муфты. Палец на резьбе ввернут в рычаг, который может поворачиваться около оси. При включении муфты правый конец рычага опускается вниз и палец освобождает муфту, которая сцепляется с муфтой. Муфта и шестерня начинают вращаться. Рычаг под действием пружины стремится возвратиться в исходное положение. При этом торец пальца опирается на поверхность муфты, которая в этот момент смещена влево. Когда вырез а муфты совместится с пальцем, то последний под действием пружины переместится вверх. При дальнейшем вращении муфты скос выреза а набегает на палец. Палец, нажимая на скос, сместит муфту вправо, причем зубцы муфт выйдут из зацепления. Расцепление происходит под действием крутящего момента, передаваемого муфтой муфте. Так как в момент расцепления крутящий момент не передается, то для окончательного вывода зубцов из зацепления служит фиксатор. Фиксатор установлен в головке одноплечего рычага, поворачивающегося вокруг оси. Призматический конец фиксатора входит в V-образное углубление муфты. Под действием фиксатора муфта дополнительно поворачивается, при этом скос выреза муфты набегает на палец и муфта получает дополнительное смещение право, причем зубцы муфт полностью выходят из зацепления. Для регулирования положения муфты в момент выключения палец расположен эксцентрично относительно резьбового стержня, с которым он выполнен за одно целое. При повороте резьбового стержня в отверстии рычага палец будет смещаться вдоль оси муфты и тем самым может быть установлен в требующееся положение. Команда для включения муфты подается путевыми упорами, устанавливаемыми на диске. Путевые упоры, действуя на собачку, поворачивают рычаг. Собачка установлена на оси и под действием пружины поворачивается по часовой стрелке. При воздействии путевого упора диска собачка сначала поворачивается вокруг своей оси, а вслед затем происходит поворот рычага; как только верхняя точка путевого упора пройдет мимо собачки, последняя под действием пружины повернется вокруг своей оси и не будет препятствовать возврату рычага в исходное положение. При отсутствии откидной собачки время подъема рычага могло бы оказаться больше времени одного оборота муфты и муфта не была бы своевременно выключена. Муфты этого типа могут быть использованы при сравнительно небольшом числе оборотов, которое обычно не превышает 120—150 об/мин. Они находят широкое применение в ряде моделей одношпиндельных токарно-револьверных автоматов для периодического включения приводов различных механизмов. В приводах токарных станков с цифровым программным управлением нашли применение мелкозубые однооборотные муфты. Периодическое вращение сообщается валу от непрерывно вращающихся шестерен. Шестерни жестко связаны со ступицей мелкозубой муфты. Мелкозубая однооборотная муфта связана торцовыми поводками с поводковой муфтой, закрепленной на валу. Под действием пружины муфта стремится сцепиться с муфтой. Между ступицами муфт установлен упорный шарикоподшипник и поводковый диск. На торце поводкового диска и ступицы муфты имеются V-образные вырезы, в которых помещаются шарики. Когда при вращении муфты поводок поводкового диска упирается в якорь электромагнита, то скосы V-образных вырезов муфты набегают на шарики и муфта смещается вправо. Шарики занимают при этом положение. При смещении муфты вправо торцовые зубцы муфты расцепляются с торцовыми зубцами муфты. Окончательное расцепление происходит так же, как в предыдущем случае под действием фиксатора, выполненного в форме качающегося рычага, ролик которого под действием пружины западает в вырез фиксирующего диска. Включение однооборотной муфты производится с помощью электромагнита, который, притягивая якорь, освобождает поводок. Одновременно с включением муфты с помощью электромагнита выключается фиксатор.
Рис. 4. Однооборотная мелкозубая муфта. При передаче малых крутящих моментов данная муфта может быть использована при высоких скоростях вращения. При высоких скоростях и значительных крутящих моментах может работать роликовая однооборотная муфта, которая может быть также выполнена реверсивной. В основу роликовой реверсивной однооборотной муфты положена конструкция реверсивной муфты обгона. Ведущая шестерня сидит на шпонке на ступице чашки, свободно вращающейся на валу. На валу на шпонке посажен диск с вырезами. В вырезах диска расположены ролики, которые под действием пружин прижимаются к внутренней поверхности чашки. При вращении чашки по часовой стрелке заклинивается пара роликов, против часовой стрелки — пара роликов, которые и передают вращение от чашки к диску. Выключение муфты производится с помощью поводкового диска, поводки которого входят в пространство между роликами. Поводковый диск снабжен выступами, которые могут упираться в якоря управляющих электромагнитов. Если ведущая шестерня с чашкой вращается по часовой стрелке, то выключение муфты производится с помощью якоря. Якорь удерживает диск, поводки которого расклинивают ролики. При включении электромагнита якорь освобождает поводковый диск и ролики вновь заклиниваются. При выключении электромагнита, пружина, расположенная в основании электромагнита, поворачивает якорь в рабочее положение и он, останавливая диск, выключает муфту.
Рис. 5. Однооборотная роликовая реверсивная муфта. Аналогичная картина имеет место при вращении муфты против часовой стрелки, только включение и выключение происходит с помощью якоря электромагнита. Расчет муфты аналогичен расчету муфты обгона. При включении и выключении однооборотных муфт в приводе могут возникать значительные динамические нагрузки, величина которых зависит от скорости и приведенного момента инерции. Величина динамических нагрузок может быть определена на основе методики, изложенной в первом разделе. При большом приведенном моменте инерции возникающие динамические нагрузки ограничивают скорость перемещения рабочего органа. Большая скорость при большем приведенном моменте инерции может быть получена при использовании в приводе мальтийских крестов.
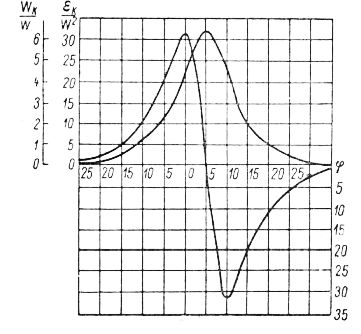
Рис. 6. Приводы с мальтийским крестом. Приводы с мальтийским крестом. Передача с мальтийским крестом обеспечивает плавное изменение скорости и ускорения. В момент входа ролика водила в паз мальтийского креста скорость равна нулю. Затем скорость плавно возрастает от нуля до максимума, после чего плавно убывает от максимума до нуля в момент выхода ролика из паза. Плавное изменение скорости исключает появление ударов первого рода, возникающих при скачкообразном изменении скорости, характерном для рассмотренных выше механизмов. Ускорение в момент входа и выхода не равно нулю и в эти моменты изменяется скачкообразно, на всем же протяжении поворота изменение ускорения пройЬсодит плавно. Скачкообразное изменение ускорения в момент входа и выхода вызывает появление ударов второго рода. Динамические нагрузки, появляющиеся при ударах второго рода, меньше динамических нагрузок, появляющихся при ударах первого рода. Благодаря указанному обстоятельству приводы с мальтийскими крестами находят значительное применение для периодического поворота многопозиционных столов, барабанов и револьверных головок, имеющих большой момент инерции. Приводы с мальтийскими крестами могут иметь различную схему. В простейшей схеме водило мальтийского креста, непосредственно связанного с рабочим органом, получает непрерывное вращение от привода. После поворота рабочий орган фиксируется фиксатором, привод которого работает синхронно с вращением водила. При рассмотренной схеме все прочие движения рабочих органов должны быть выполнены в интервале между двумя смежными поворотами рабочего органа. Время, которое может быть использовано на все прочие движения, зависит от числа оборотов водила в минуту и угла поворота водила за период поворота мальтийского креста. Поскольку при указанных условиях возникает зависимость между временем всех прочих ходов и скоростью вращения водила, а соответственно и временем поворота рабочего органа, то такое решение может привести к чрезмерному возрастанию времени поворота, что ведет к снижению производительности станка. Указанного недостатка можно избежать при одновременном использовании в приводе однооборотной муфты и мальтийского креста. Водило мальтийского креста получает в этом случае вращение от вала однооборотной муфты и при выключенной муфте остается неподвижным. При включении одно-оборотной муфты водило делает один оборот и вновь выключается с помощью однооборотной муфты. В этом случае время поворота рабочего органа определяется только величиной динамических нагрузок, возникающих при работе мальтийского креста. Динамические нагрузки, возникающие при включении муфты, малы, так как в момент включения муфты ускорение получают только промежуточные передачи и водило. Привод с однооборотной муфтой и мальтийским крестом широко используется в одношпиндельных токарно-револьверных автоматах для поворота револьверной головки. Вместо однооборотной муфты для периодического поворота водила мальтийского креста может быть использован также отдельный электродвигатель, связанный через соответствующую понижающую передачу с валом водила. При повороте рабочего органа подается сигнал для включения электродвигателя. По окончании поворота рычаг фиксатора, работающего синхронно с водилом, нажимает на конечный выключатель и подает сигнал для выключения двигателя. При выключении двигателя привод включает тормоз. Непостоянство в положении водила в момент остановки не имеет никакого значения, так как эта ошибка не сказывается на процессе поворота мальтийского к^ста, поскольку водило в момент остановки не находится в зацеплении с крестом, а накопление ошибок не может возникнуть. Подобные приводы используются для поворота многопозиционных столов агрегатных станков. Для того чтобы при входе и выходе ролика кривошипа не возникал жесткий удар первого рода ось кривошипа 0хс должна быть в эти моменты расположена под прямым углом к оси Ос паза.
Рис. 7. График изменения скорости и ускорения мальтийского креста.
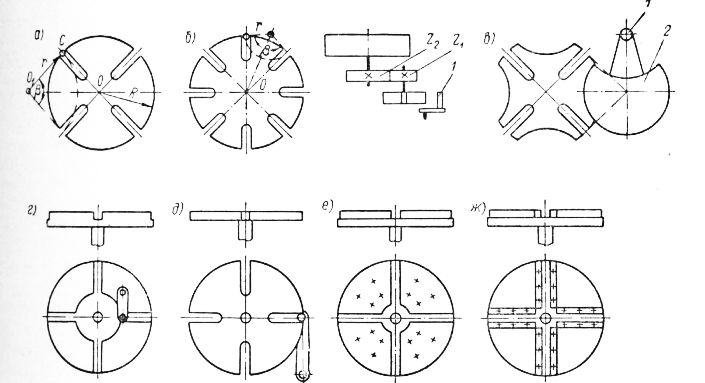
Рис. 8. Мальтийские кресты. Благодаря наличию зазоров в зубчатой передаче фиксация рабочего органа не обеспечивает в данном случае точной фиксации самого мальтийского креста. Поэтому при наличии промежуточной передачи возникает необходимость в дополнительной фиксации мальтийского креста, которая осуществляется с помощью диска, сидящего на одной оси с водилом. Усилия, возникающие на валу водила, складываются из статических нагрузок, возникающих под влиянием сил трения в направляющих перемещающегося рабочего органа, и динамических нагрузок, возникающих под влиянием ускорений. Как статический, так и динамический моменты: изменяются в функции угла поворота водила, причем максимумы моментов не совпадают. Для упрощения расчета примем, что наибольший момент на валу водила равен сумме наибольшего статического и динамического моментов, что пойдет в запас прочности. Не рассматривая выводов, на основе которых определяется статический и динамический моменты, приведем окончательные формулы для определения их величины. Мальтийские кресты имеют различное конструктивное оформление. Пазы мальтийского креста могут быть прорезаны в целом диске. При термически обработанных крестах такая конструкция требует применения весьма трудоемких процессов шлифования пазов. Сборный крест, состоящий из отдельных секторов или отдельных планок, не требует столь трудоемких процессов обработки, но при сборке креста возникает необходимость в специальных сборочных приспособлениях. Цельный крест может также иметь форму сборного креста, представленного на рис. 8, е, что позволяет упростить технологию обработки. Кресты больших размеров примущественно выполняются сборными, а малых— цельными. Технология обработки и сборки должна обеспечивать высокую точность углового расположения и ширины пазов. В ряде случаев применяются пазы с внутренним зацеплением, имеющие более компактную конструкцию, но требующие большого угла поворота водила за время поворота креста. Приводы с храповыми механизмами. В приводах для периодического перемещения рабочих органов применяются как храповые муфты, так и храповые шестерни. Храповые муфты выполняются с торцовыми несимметричными зубцами. Одна половина муфты сидит на шпонке на валу рабочего органа, а вторая жестко связана с ведущей шестерней. Полумуфты сцепляются под действием пружины. При повороте шестерни против часовой стрелки зубцы полумуфты, связанной с шестерней, захватывают зубцы полумуфты и рабочий орган поворачивается вместе с шестерней. При повороте шестерни в обратном направлении полумуфта отжимается вправо и рабочий орган остается неподвижным. Привод фиксатора работает синхронно с шестерней. Шестерня может получать реверсивное движение от различных видов приводов. Если вращение шестерни в обоих направлениях происходит с постоянной скоростью, то в момент начала и конца движения могут возникать значительные инерционные нагрузки. Плавное изменение скорости и ускорения может быть получено при использовании в приводе кулачкового механизма той или иной конструкции. На схеме кулачок сообщает движение качающемуся рычагу с зубчатым сектором, который зацепляется с шестерней. Механизмы такого рода применяются в отдельных случаях для поворота многопозиционных барабанов.
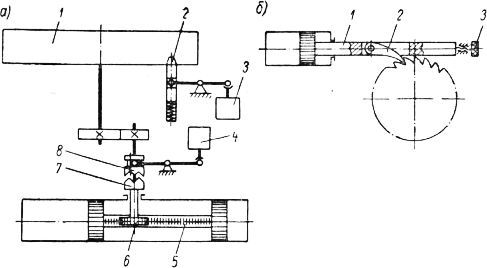
Рис. 9. Приводы с храповым механизмом. В приводах с храповыми шестернями храповая шестерня, связанная с рабочим органом либо непосредственно, либо через промежуточную передачу, получает движение от собачки, которая связана шарнирно либо с качающимся рычагом, либо с поступательно движущимся толкателем. Рычаг совершает качательное движение и при ходе по часовой стрелке поворачивает собачкой храповую шестерню, а при ходе назад собачка откидывается и храповая шестерня остается неподвижной. Рычаг может получать качательное движение от различных приводов. На схеме движение рычага заимствуется от кривошипного диска, который связан с рычагом шатуном. Переставляя палец кривошипа по пазу диска можно изменять угол качания рычага, а соответственно и угол поворота храповой шестерни. При постоянном угле качания рычага угол поворота храповой шестерни можно изменять с помощью щитка. Поворотом щитка можно перекрыть часть зубьев храповой шестерни, находящихся в пределах угла качания рычага. При повороте рычага против часовой стрелки щиток приподнимает собачку и на участке, перекрытом щитком, собачка не захватывает храповую шестерню. Конструкции храповых механизмов весьма многообразны. Приводы с храповыми механизмами рассмотренного типа в различном конструктивном оформлении находят широкое применение для осуществления периодических движений подачи в шлифовальных, поперечно-строгальных и других станках. Если периодически поворачивающийся рабочий орган расположен на салазках, совершающих прямолинейное движение, то могут быть использованы приводы, схемы которых представлены на рис. 9, виг. Схема, представленная на рис. 9, в, характерна для револьверных головок. На одной оси с револьверной головкой сидит храповая шестерня. На неподвижных направляющих рабочего органа расположена собачка. При ходе рабочего органа влево зуб храповой шестерни упирается в собачку и при дальнейшем движении рабочего органа храповая шестерня вместе с револьверной головкой поворачивается на соответствующий угол. Привод фиксатора обеспечивает своевременный вывод и ввод фиксатора. Схемы, подобные представленной на рис. 9, г, применяются при фрезеровании и шлифовании зубьев и других операциях. При ходе рабочего органа влево ролик штока с зубчатой рейкой набегает на неподвижный кулачок. Шток перемещается вверх и поворачивает шестерню, связанную храповой муфтой с рабочим органом. При ходе рабочего органа вправо пружина опускает шток вниз и шестерня поворачивается в исходное положение. Расчет храповых муфт с торцовыми зубцами аналогичен расчету самовыключающихся муфт. Существенным недостатком храповых механизмов является возможность появления значительных ударных динамических нагрузок. В конце хода возможен также перебег поворачиваемых звеньев, имеющих запас кинетической энергии. Поршневые приводы. Гидравлические и пневматические поршневые приводы находят значительное применение для периодического поворота рабочих органов. На штоке нарезана зубчатая рейка, зецепляющаяся с шестерней, связанной с кулачковой муфтой. Кулачковая муфта может быть сцеплена с кулачковой муфтой. При включении муфты вращение передается рабочему органу. Включением муфты управляет привод. При ходе поршня в одном направлении, например влево, муфта включается и рабочий орган поворачивается. При ходе поршня в обратном направлении муфта выключается и рабочий орган остается неподвижным. Синхронно с приводом поворота работает привод фиксатора. Приводы также выполняются гидравлическими, либо пневматическими.
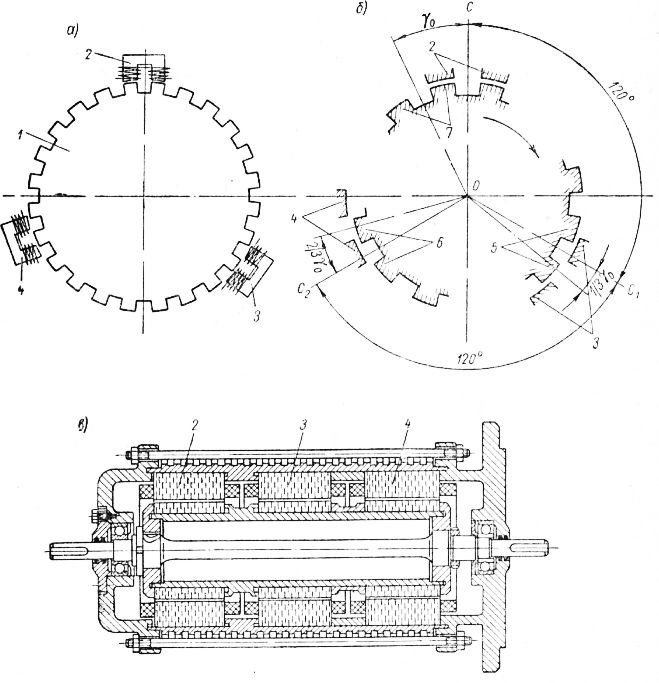
Рис. 10. Поршневые приводы. Гидравлические и пневматические приводы используются также совместно с храповыми механизмами. От пневматического или гидравлического поршневого двигателя может получать движение шестерня храповой муфты приводов, изображенных на рис. 9, а яг. Весьма простое конструктивное решение может быть получено при установке собачки непосредственно на штоке поршневого двигателя. Такой вариант широко используется в приводах подач шлифовальных станков. Величина хода поршня, а соответственно и угол поворота храповой шестерни, регулируется установочным винтом, ограничивающим перемещение поршня. Шаговые электродвигатели. В шаговых электродвигателях цепь питания электродвигателя включается периодически. При каждом включении цепи питания ротор электродвигателя поворачивается на определенный точно фиксированный угол. Включение цепи питания может происходить с большой частотой. У некоторых моделей шаговых электродвигателей частота включения достигает 6000 гц. При большой частоте включений ротор электродвигателя практически вращается непрерывно, однако останов ротора происходит с высокой точностью в соответствии с заданным числом включений. Изменяя частоту включения можно изменять скорость вращения ротора. Суммарный угол поворота ротора задается числом включений с помощью соответствующей системы управления. Конструкции шаговых электродвигателей весьма многообразны. Простейшую конструкцию имеют электромеханические шаговые электродвигатели, в которых электромагнит приводит в движение собачку храпового привода. Такие шаговые электродвигатели работают с невысокой частотой и развивают небольшой крутящий момент. Они находят применение в аппаратах управления, например в шаговых искателях. Значительно более широкое применение могут найти шаговые электродвигатели с электромагнитной связью ротора и статора. Рассмотрим одну из принципиальных схем шагового электродвигателя. Ротор имеет ряд полюсов, а статор состоит из трех независимых секций. На рис. 11, б полюса ротора и статора изображены в увеличенном виде. Шаг полюсов ротора равен у0. Полюса секции статора расположены симметрично относительно линии Ос; полюса секции смещены на 1/3 у0 относительно линии Ocv расположенной под углом 120° к линии Ос, а полюса секции — на 2/3у0 относительно линии 0с2, расположенной под углом 240° к линии Ос. В рассматриваемый момент полюса ротора смещены относительно полюсов секции статора на угол х/3 у0, соответственно полюса ротора, расположенные под углом 120° к полюсам, будут смещены на 2/3у0 относительно полюсов секции статора, а полюса ротора смещены на угол у0 относительно полюсов секции статора.
Рис. 11. Шаговые электродвигатели. При включении обмотки секции статора полюса ротора совместятся с полюсами секций и ротор повернется на угол 1/3у0, при этом полюса ротора окажутся смещенными на 1/3у0 относительно полюсов секции статора, а полюса ротора на 2/3уо относительно полюсов секции статора. При выключении обмотки секции и включении обмотки секции статора полюса ротора совместятся с полюсами секции статора и ротор повернется опять на угол 1/3Yo> полюса ротора займут положение, при котором они будут смещены на угол 1/3у0 относительно полюсов секции статора. При выключении обмотки секции и включении обмотки секции полюса ротора совместятся с полюсами секции статора и ротор опять повернется на угол VaYo; при этом следующая пара полюсов ротора займет такое положение, при котором они будут смещены относительно полюсов секции статора на 1/3у0 и весь процесс включения обмоток повторится. Секции статора размещены вдоль оси двигателя; число полюсов статора равно числу полюсов ротора. Каждая секция статора развернута относительно предыдущей на угол Х/Зу0. Последовательное включение обмоток осуществляется с помощью распределителя импульсов системы управления. Вращающий момент шаговых электродвигателей, работающих в системе управления, 2—ЮкГ-см, силовых шаговых электродвигателей до 300 кГ-см. Шаговые электродвигатели с малым крутящим моментом используются в силовых приводах совместно с гидравлическим усилителем моментов. Гидравлический усилитель моментов представляет собой гидравлический двигатель вращательного движения с поворотным распределительным устройством. При повороте распределительного устройства на тот или иной угол на такой же угол поворачивается ротор гидродвигателя. Распределительное устройство приводится в движение шаговым электродвигателем с малым крутящим моментом, ротор гидродвигателя, поворачивающийся синхронно с распределительным устройством, развивает большой крутящий момент. Принцип действия гидроусилителя моментов иллюстрирует принципиальная схема, изображенная на рис. 12. Гидродвигатель связан с насосом и сливным трубопроводом через распределительное устройство. От насоса масло поступает в выточку корпуса распределительного устройства, а выточка связана со сливным трубопроводом. С выточками связаны соответствующими каналами отверстия гидродвигателя. Выточки корпуса могут сообщаться между собой через отверстия втулки, вращающейся вместе с валом гидродвигателя, и продольные канавки пробки, вращающейся вместе с валом шагового электродвигателя. При повороте шагового электродвигателя по часовой стрелке отверстие соединяется с канавкой и масло из выточки поступает через кольцевую проточку пробки к отверстиям и далее через выточку к отверстию гидродвигателя. Вал гидродвигателя также поворачивается по часовой стрелке. Масло, поступающее из гидродвигателя через отверстие, попадает через выточку и отверстия в кольцевую проточку пробки 8 и далее через продольную канавку и отверстие 11’ в кольцевую выточку, которая связана со сливным трубопроводом. При вращении вала шагового электродвигателя против часовой стрелки отверстие соединяется с продольной канавкой и масло, поступающее от насоса, направляется через проточку пробки отверстия и выточку к отверстию гидродвигателя, вал которого начинает вращаться против часовой стрелки. Масло, поступающее от гидродвигателя через отверстие.
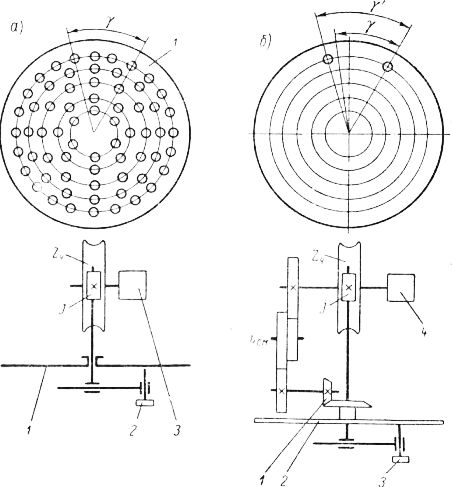
Рис. II. 13. Ручные делительные приводы. Так как число рядов отверстий ограничено, то не все числа делений могут быть получены таким простейшим способом. Для расширения возможностей делительного устройства применяют дифференциальный метод деления. Если в предыдущем случае делительный диск был неподвижным, то при дифференциальном делении делительный диск также может поворачиваться. Полученное выражение служит для определения передаточного отношения сменных зубчатых колес, которые должны быть установлены при нарезании заданного числа делений. На базе рассмотренных принципиальных схем работает большинство современных делительных головок. Устройства для устранения зазоров в кинематических цепях. Если при периодическом повороте фиксируется положение ведущего вала, а не ра.
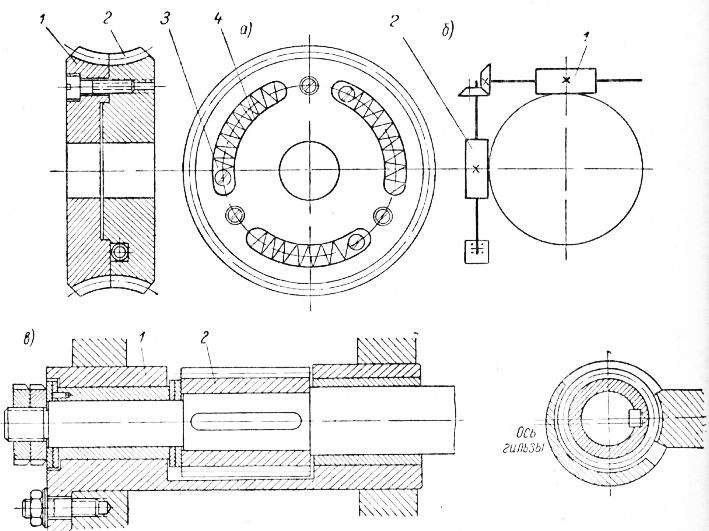
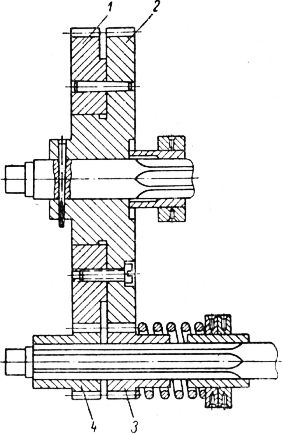
Рис. 14. Устройства для устранения зазоров в червячных передачах. бочего органа, как это имеет место в приводах с однооборотной муфтой, в ручных делительных приводах и других случаях, то на точность положения рабочего органа влияют зазоры в кинематической цепи. Наибольшее влияние оказывают обычно зазоры в последних звеньях цепи — в передачах винт — гайка и в червячных передачах. Вопрос об устранении зазоров в передачах винт—гайка рассмотрен в главе четвертой настоящего раздела. Для устранения зазоров в червячных передачах используется ряд различных конструктивных решений. Червячное колесо может быть изготовлено разъемным в плоскости перпендикулярной оси. Поворачивая одну часть относительно другой оси и стягивая их винтами устраняют зазор между зубцами червячного колеса и витками червяка. Однако непостоянство зазора по окружности колеса не позволяет устранить зазор полностью. Для автоматического устранения зазора в одной из частей разъемного колеса выфрезе-ровываются дуговые канавки, куда закладываются пружины. Со второй частью связываются пальцы, которые заходят в канавки первой части. Пружины, действуя на пальцы, стремятся повернуть одну часть колеса относительно другой и непрерывно устраняют зазор между витками червяка и зубьями колеса. Пружины должны развивать достаточное усилие. Недостатком этой конструкции является, то что нагрузка передается только половиной ширины зуба. В конструкции по рис. 14 регулировка зазора производится изменением межосевого расстояния червячной передачи. Червяк смонтирован в эксцентрично расположенных отверстиях гильзы. Поворачивая гильзу изменяют положение оси червяка и уменьшая расстояние между осями червяка и червячного колеса тем самым устраняют зазор. При тяжелых нагрузках для устранения зазоров применяется система с двумя червяками. Червяк смонтирован как обычно и не может перемещаться в осевом направлении, червяк же смещается в осевом направлении либо в процессе регулировки, либо под действием пружины. При смещении червяка червячное колесо поворачивается вокруг своей оси до тех пор, пока поверхности зубьев колеса не придут в контакт с поверхностью витков червяка. После регулировки червяк фиксируется в требующемся положении. При регулировке червяк перемещается либо вместе с опорами, либо вдоль оси вала. Во многих станках для устранения зазора в червячной передаче используются червяки с двойным шагом (т. е. с переменной толщиной витка). Для устранения зазора червяк смещается в осевом направлении и в зацепление с колесом вводится часть червяка с большей толщиной витка. При отсутствии червячных передач или передач винт—гайка на точность перемещений рабочих органов оказывают существенное влияние зазоры в цилиндрических и конических зубчатых передачах. Эти передачи могут быть выполнены разъемными аналогично конструкции червячных передач, представленной на рис. 14, а. Для устранения зазоров в цилиндрических зубчатых передачах применяются также сдвоенные косо-зубые колеса. Косозубые колеса с различным направлением зуба жестко связаны между собой, а колесо под действием пружины перемещается в осевом направлении на шлицах или на шпонке. При осевом смещении колеса оно, действуя на сдвоенные колеса, поворачивает их вокруг оси до тех пор, пока поверхности зубьев колеса не придут в контакт с поверхностями зубьев колеса.
Рис. 15. Устройства для устранения зазоров в цилиндрических зубчатых передачах. Ошибки в шаге и других элементах передач кинематической цепи также могут сказываться на точности перемещений рабочих органов. Однако влияние указанных факторов становится существенным только при очень высоких требованиях к точности. Возникающие ошибки могут быть исправлены с помощью коррекционных устройств, вопрос о которых рассматривается в следующей главе. Реклама:Читать далее:Фиксирующие механизмыСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|