|
|
Категория:
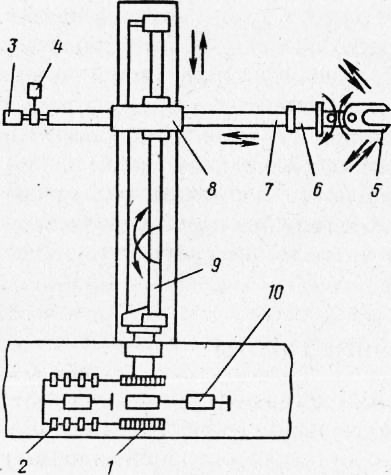
Слесарно-механосборочные работы Развитие автоматизации производственных процессов привело к появлению принципиально новых устройств для выполнения вспомогательных и даже сборочных операций — машин с человекоподобными действиями, которым дали название роботы. Роботы производят такие операции, как установку и съем заготовок и готовых деталей, погрузку и разгрузку, сборку, сварку, включение и выключение оборудования. Эти новые средства автоматизации выделены в особый класс Устройств — «промышленные роботы». Промышленный робот — это устройство с программным управлением, выполняющее автоматически вспомогательные (установка, съем, погрузка, разгрузка) и технологические опера, ции (сборка, сварка, пайка, окраска) в процессе изготовления изделия. Все промышленные роботы имеют «руку», которую называют манипулятором, механизм для захвата и подачи предмета обработки или средства обработки. Робот обычно состоит из манипулятора, блока программного управления, двигателя, движителя, регистрирующих и анализирующих блоков (датчиков), блоков управления, телекамеры, дальномера. Основные устройства монтируются на специальной раме или в жестком кожухе. Рама крепится к полу или подвесу неподвижно, а также может иметь движители — колеса, ролики для перемещения по полу, направляющим рельсам или платформам. Пульт управления может выполняться выносным или на роботе. Выносные пульты могут обслуживать сразу несколько специальных роботов, работающих по жесткой программе действия. В качестве силовых агрегатов роботов используют гидравлические и пневматические станции, которые могут быть автономными или выносными. На рис. 1 представлена функциональная схема робота. Робот УМ-1 имеет пять степеней свободы, не считая движения схвата. Рука робота перемещается в цилиндрической системе координат, т. е. два ее движения прямолинейны. Движение руки осуществляется от упора до упора. Положение упоров регулируется в зависимости от требуемой величины хода. Кисть с захватом поворачивается гидроцилиндрами поворота кисти. Манипулятор перемещается по каретке, которая расположена на колонне.
Рис. 1. Функциональная схема робота:
1 — зубчатая передача, 2 – гидроцилиндр поворота колонки, 3, 4 – гидроцилиндры поворота кисти, 5 – захват, 6 – кисть, 7 – рука, 8 — каретка, 9 – колонна, 10 — гидроамортизатор
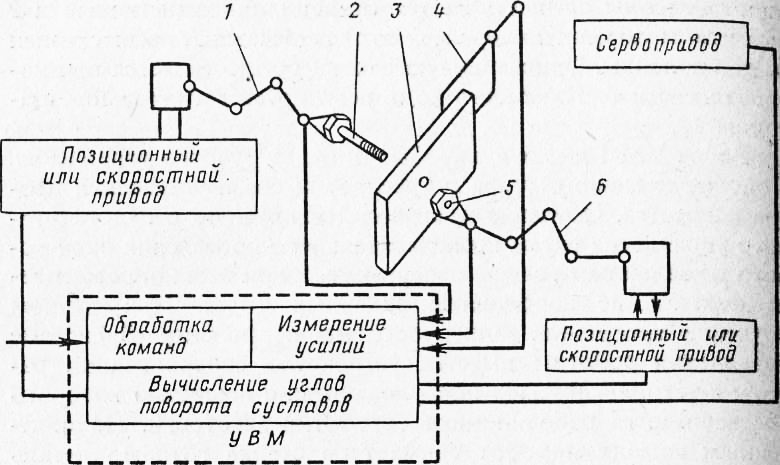
Положение манипулятора и траектории его перемещения программируется. Обучение производится вручную с пульта ручного управления путем последовательного проведения руки робота по заданным точкам программы, и при этом определяются фактические координаты заданных точек. При ручном обучении программа записывается на перфоленту В системе управления роботом имеется устройство синхронизации работы с технологическим оборудованием, с помощью которого обеспечивается рабочий цикл обработки заготовки. По полученным командам робот снимает со станка готовую деталь и устанавливает новую заготовку. Широкое применение находят роботы, у которых запись программы осуществляется по методу самообучения. Оператор при наладке перемещает руку с захватом в расчетные точки траектории движения. Положение манипулятора фиксируется в виде сигналов от кодовых датчиков в блоке памяти на магнитном барабане в определенной последовательности. После окончания обучения робот выполняет работу самостоятельно. Роботы, выполняющие технологические процессы, имеют более совершенную память, которая позволяет получить информацию о внешней среде от различного типа датчиков. Роботы такого типа определяют наличие, положение и размеры предмета в рабочей зоне, контролируют величину усилия зажима. На рис. 2 показана схема работы робота при сборке. Левый манипулятор должен взять болт и вставить его в отверстие детали, прежде определив его положение. Правый манипулятор должен взять гайку, определить положение болта и навернуть гайку. Датчики усилий определяют усилие затяжки и число витков. Самостоятельность робота в выборе решений определяется заложенным алгоритмом программы. Если гайка выполнена с меньшим резьбовым отверстием, то возрастает контролируемое усилие затяжки и робот возвращает гайку на предметный стол. Деталь удерживается манипулятором. Весь процесс управляется ЭВМ.
Рис. 2. Схема работы сборочного робота:
1 – левый манипулятор, 2 – болт, 3 – собираемая деталь, 4 – манипулятор, 5 — гайка, 6 — правый манипулятор
Реклама:Читать далее:Планирование промышленного производстваСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|