|
|
Категория:
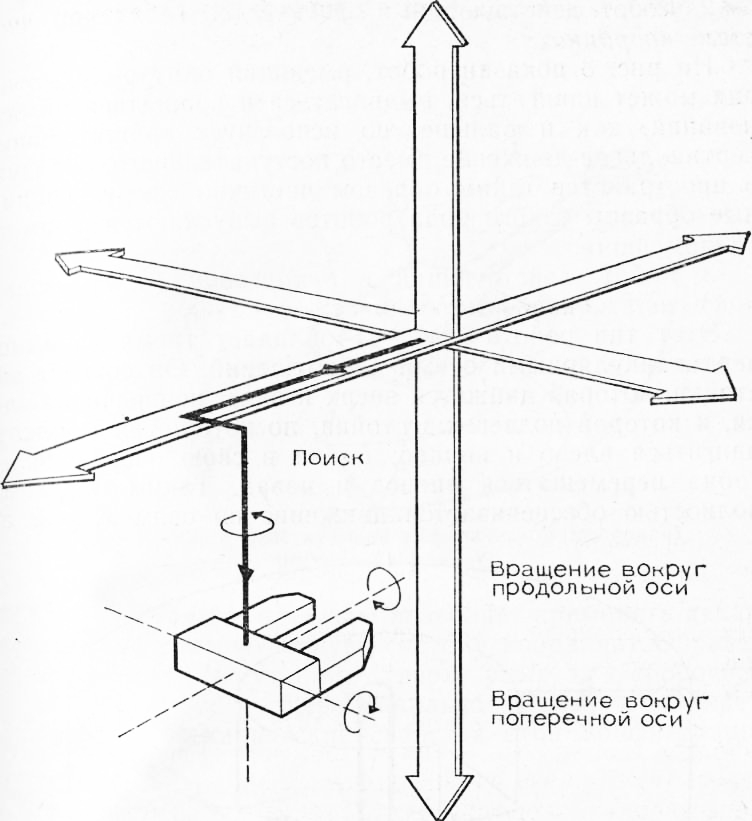
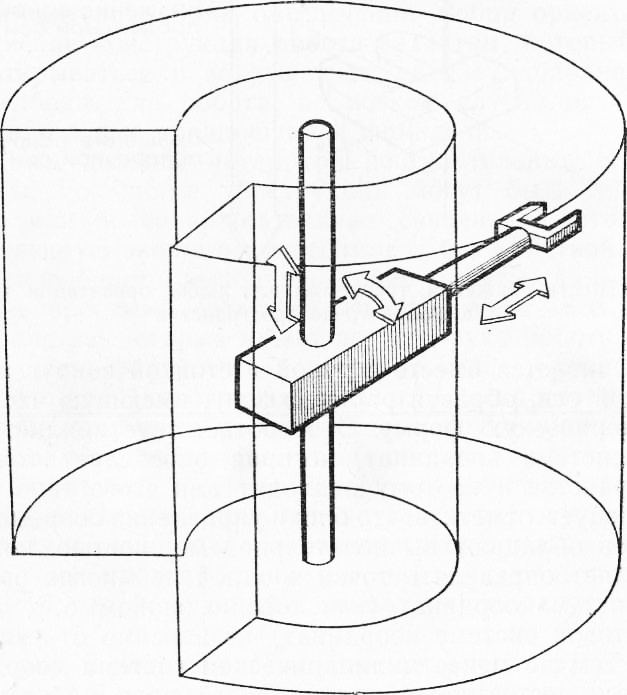
Роботы в промышленности Далее: Классификация роботов Основная роль руки состоит в том, чтобы перемещать захват или инструмент в заданные точки пространства при соответствующей ориентации. Чтобы сориентировать объект любым образом и в любой точке пространства (рис. 1), рука должна иметь шесть степеней свободы — три поступательные (вправо и влево, вперед и назад, вверх и вниз) с целью достичь любой точки и три вращательные для обеспечения любой ориентации. Дополнение конструкции робота захватом, который может открываться и закрываться, не дает дополнительной свободы для робота, во всяком случае не более, чем мог бы дать вращающийся шпиндель. Роботы должны иметь три поступательные степени свободы, но многие конструкции могут быть лишены одного или более вращательных сочленений, что дает существенную экономию в стоимости без заметной потери в способности выполнять такие работы, как манипуляция простыми деталями. Рабочие зоны (все точки пространства, которые может достичь рука робота) различаются по форме, что зависит от конфигурации, выбранной для конструкции руки. Распространенная классификация руки роботов по конструкции включает группирование по координатной системе трех главных (поступательных) осей, которые обеспечивают вертикальный подъемный ход, ход внутрь и наружу, вращательное или поперечное движение относительно вертикальной оси робота. Различают шесть основных типов. 1. Робот, действующий в цилиндрической системе координат. На рис. 2 показан робот, горизонтальная рука которого может вдвигаться и выдвигаться параллельно основанию, двигаться вверх и вниз по вертикальной стойке (оставаясь параллельной основанию), а основание поворачивается вместе с рукой и стойкой вокруг вертикальной оси, образуя рабочую зону, имеющую частично Цилиндрическую форму. Это соответствует цилиндрической системе координат, которая определяет точки в пространстве и поэтому подходит для этого типа робота. Следует отметить, что блоки управления современных Роботов обладают вычислительной мощностью, которая позволяет определять точки в одной из многих различных систем координат (как хорошо знакомые х, у, z в Декартовой системе координат) независимо от типа ро-б°та. Тем не менее цилиндрическая система координат остается «естественной» для такого рода роботов, типичные образцы которых выпускают фирмы «Фанук», «Прэб» и «Сейко».
Рис. 1. Шесть движений, требуемых для любой ориентации захвата в любой точке пространства
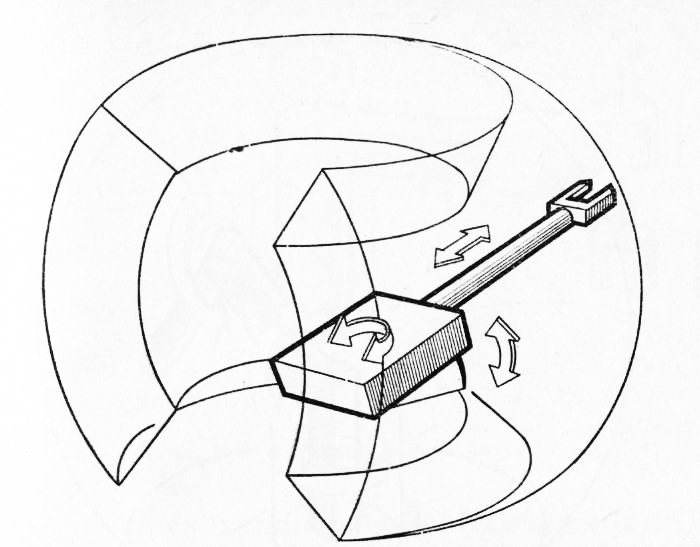
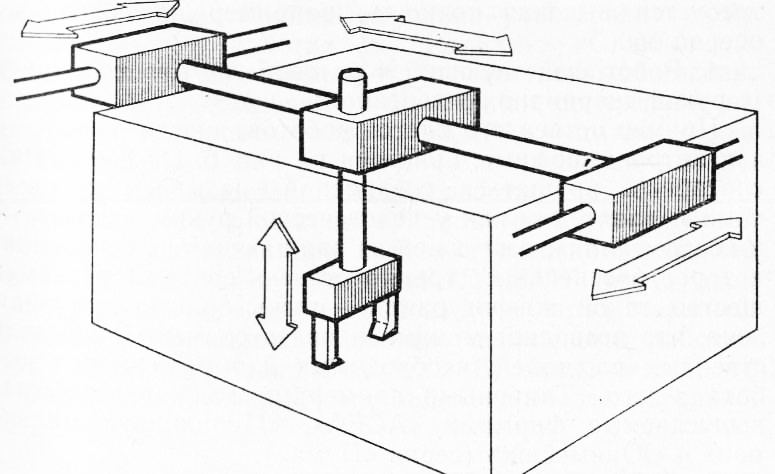
2. Робот, действующий в сферической (полярной) системе координат. На рис. 3 показан робот, имеющий одну руку, которая может вдвигаться, выдвигаться и вращаться на основании, как и раньше, но использует вращательное вертикальное движение вместо поступательного, образуя в пространстве таким образом частично сферу. Типичные образцы такого рода роботов выпускаются фирмой «Юнимейшн». 3. Робот, действующий в декартовой (прямоугольной) системе координат. Этот тип робота (рис. 4) обладает тремя взаимно перпендикулярными осями перемещений. Он состоит из стойки, которая движется вверх и вниз; поперечной балки, к которой подвешена стойка, по которой она может двигаться влево и вправо; балка в свою очередь способна перемещаться вперед и назад. Таким образом, полностью обеспечивается движение по осям х, у и z.
Рис. 2. Робот, действующий в цилиндрической системе координат
Рис. 3. Робот, действующий в сферической (полярной) системе координат
Эта конфигурация идеально позволяет применять декартовую (или прямоугольную) систему координат. Образцы таких роботов могут иметь сверху раму, как сборочный робот «ИБМ-7565» (первоначально «РС1») и «Оливет-ти сигма». Механические свойства этой конфигурации позволяют широко применять такие роботы там, где требуется высокая точность, например на сборочных операциях.
Рис. 4. Робот, действующий в декартовой (прямоугольной) системе координат
Рис. 5. Робот (рука), действующий в угловой системе координат
4. Робот, действующий в угловой системе координат (с рукой, шарнирно сочлененной). Пример четвертого класса роботов, иногда известных как антропоморфные, приведен на рис. 5. Он состоит из способных вращаться соединений, называемых «плечом» и «локтем» (как у человеческой руки), закрепленных на «талии», состоящей из вращающегося основания, которое обеспечивает третью степень свободы. Преимущество такой конфигурации — очень большая рабочая зона, что позволяет минимизировать размеры производственных площадей, необходимых для размещения робота в цехе. Типичными примерами являются роботы, выпускаемые фирмами «АСЕА», «Цинциннати милэк-рон» и «Юнимейшн» (серии «Пума»), 5. Роботы типа «СКАРА». В апреле 1981 г. впервые появился робот принципиально новой конструкции, созданный в Японии в университете Яманаси, названный «СКАРА»1 (рис. 6). Он подобен роботу, действующему в угловой системе координат, но его вращающиеся сочленения расположены в горизонтальной, а не в вертикальной плоскости с использованием вертикальной оси для подъема захвата. Такая конструкция сочетает свойства роботов, действующих в угловой и цилиндрической системах координат. За счет жесткости конструкции в вертикальном направлении роботы типа «СКАРА» могут нести гораздо более высокие полезные нагрузки, чем другие сборочные роботы,— до 30 кг. Многие компании участвовали в исследовательских работах по созданию «СКАРА», а «Пентел» и «ГЕК» разработали собственные модели. Фирма «ИБМ» заключила лицензионное соглашение на продажу роботов типа «СКАРА» — таких, как «ИБМ-7535».
Рис. 6. Робот типа «СКАРА»
6. Параллельно действующий робот. Радикальный отход от традиционных конструкций роботов осуществлен при создании исследовательского Робота «ГЭДФЛАЙ»2. Робот «ГЭДФЛАЙ» имеет диск с инструментами, подвешенный на трех парах стержней. Изменяя длину стержней, можно перемещать рабочий °Рган по шести степеням свободы. Особенно важно, что благодаря сочленениям, собранным не последовательно, как в других роботах, а параллельно, система может быть очень легкой, быстрой и точной. Однако это преимущество сводится на нет из-за малой рабочей зоны. Такие роботы могут найти применение для легких сборочных операций. Реклама:Читать далее:Классификация роботовСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|


|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|