|
|
Категория:
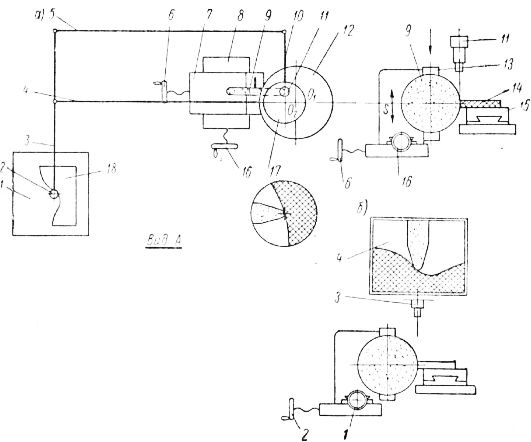
Металлорежущие станки Управление при ручном приводе рабочих органов. Простейшей формой следящего управления является ручное управление при ручных приводах механизмов перемещения рабочих органов. Такого рода системы находят применение на профилешлифовальных станках, на которых копирование осуществляется по чертежу, увеличенному в 10-50 раз по сравнению с обрабатываемой деталью, либо с помощью пантографа, либо с помощью экрана. Обрабатываемая деталь закрепляется на столике, имеющем установочные перемещения. Шлифовальный круг совершает движение подачи вдоль образующей линии профиля детали при перемещении салазок. Вдоль направляющей линии шлифовальный круг перемещается с помощью рукояток. Для совмещения режущей кромки шлифовального круга с направляющей линией используется микроскоп с перекрестием. Перекрестие микроскопа перемещается вдоль направляющей с помощью пантографа по чертежу, закрепленному на столе. Пантограф состоит из штанг, шарнирно связанных между собой. Штанга жестко связана с гильзой, поворачивающейся вокруг оси являющейся осью поворота пантографа. В эксцентрично расположенном отверстии гильзы помещается втулка, которая может поворачиваться вокруг оси Оа, являющейся осью четвертого шарнира пантографа. В эксцентрично расположенном отверстии втулки помещается микроскоп. При перемещении контактного штифта пантографа по линии чертежа перекрестие микроскопа описывает путь, подобный линии чертежа, уменьшенного в соответствующем масштабе. Практически используется масштаб 25 : 1, 50 : 1.
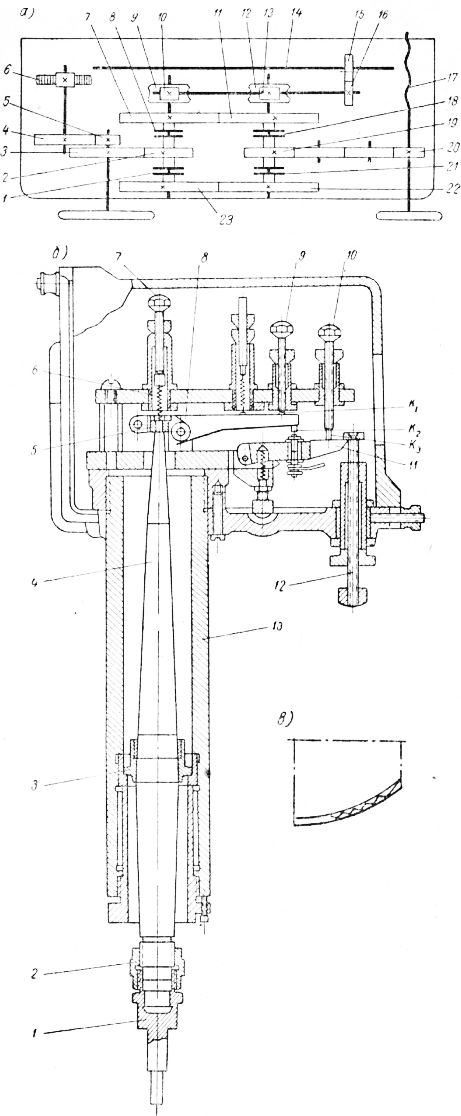
Рис. 1. Схемы следящих систем с ручным приводом. Рабочий перемещает контактный штифт по линии чертежа и наблюдает в микроскоп за рассогласованием положения режущей кромки круга и перекрестия микроскопа и устраняет это рассогласование с помощью рукояток. В ряде случаев изображение, видимое в микроскопе, проектируется на экран. На профилешлифовальных станках с экраном чертеж, выполненный в увеличенном масштабе на прозрачном материале, например на кальке, помещается на экране. На этот же экран с помощью микроскопа проектируется изображение режущей кромки шлифовального круга и обрабатываемой детали. Рассогласование в положении изображения режущей кромки круга и линии чертежа наблюдается непосредственно на экране и устраняется с помощью рукояток. Профилешли-фовальные станки с экраном значительно удобнее в работе станков с пантографом. Следует заметить, что станки с пантографом находят также значительное применение для непосредственного копирования при выполнении профиле-шлифовальных, фрезерных и гравировальных работ. В этом случае вместо чертежа используется копир и рабочий, прижимая контактный штифт к копиру, перемещает его вдоль кромки копира вручную, при этом обрабатываемая деталь и режущий инструмент перемещаются друг относительно друга по заданной траектории. Управление при механическом приводе с электромагнитными муфтами. В качестве примера рассмотрим управление перемещениями суппорта токарного станка при обработке поверхностей вращения с криволинейной образующей. Механизмы фартука получают вращение от шестерни, скользящей на шпонке вдоль ходового вала. От шестерни вращение передается через шестерню червякам. Червячные шестерни сидят на шпонках на своих валах. Цилиндрические шестерни и электромагнитные муфты служат для включения продольной и поперечной подач и реверса. Механизм продольной подачи получает движение от шестерни, от которой вращение передается через шестерни реечной шес-стерне. Шестерня сидит на валу свободно. Она может быть сцеплена электромагнитной муфтой с шестерней, а электромагнитной муфтой — с шестерней. Шестерня сидит на валу на шпонке и при включении электромагнитной муфты шестерня непосредственно сцепляется с валом червячной шестерни. При включении электромагнитной муфты шестерня сцепляется с шестерней, которая сидит на валу свободно и получает вращение от шестерни, закрепленной на валу червячной шестерни. Таким образом, при включении электромагнитной муфты шестерня получает вращение через паразитную шестерню и направление продольной подачи изменяется. Механизм поперечной подачи получает движение от шестерни, от которой вращение передается через промежуточные шестерни и шестерню винту поперечной подачи. Реверсирование поперечной подачи осуществляется с помощью электромагнитных муфт. При включении муфты шестерня получает вращение от вала червячной шестерни, при включении муфты — от вала червячной шестерни 9 через шестерни 7—11. Включая и выключая поочередно соответствующие электромагнитные муфты, а вместе с тем продольную и поперечную подачу в том или ином направлении, перемещают вершину режущей кромки инструмента вдоль образующей линии. Включением и выключением электромагнитных муфт управляет копировально-измерительный прибор. Копировальный прибор связан с поперечными салазками суппорта. Щуп копировального прибора опирается на поверхность плоского копира — шаблона. При перемещении суппорта в продольном или поперечном направлении копир воздействует на щуп копировального прибора и вызывает его перемещение, в результате чего копировальный прибор вырабатывает сигналы управления, поступающие в блок управления, который, в свою очередь, подает сигналы для включения или выключения тех или иных электромагнитных муфт. Щуп закреплен гайкой на стержне копировального прибора. Стержень может качаться около центра сферической чашки и перемещаться в осевом направлении. Сферический конец стержня входит в углубление рычага, который качается около оси. При повороте рычага происходит замыкание и размыкание контактов прибора в результате чего вырабатываются соответствующие сигналы управления.
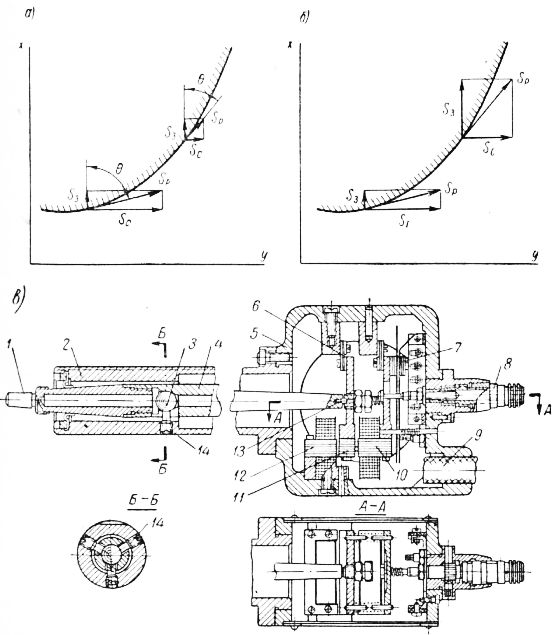
Рис. 2. Схема привода с электромагнитными муфтами и копировальный контактный прибор Рычаг прижат к стержню пружиной, усилие которой, регулируется винтом. При повороте рычага под действием пружины происходит замыкание контактов в результате чего подается сигнал для включения электромагнитной муфты поперечной подачи и поперечный суппорт перемещается вперед по направлению к копиру. Когда палец копировального прибора придет в контакт с копиром, стержень повернется и, в свою очередь, повернет рычаг. Контакты Ki, регулируемые винтом, разомкнутся, электромагнитная муфта поперечной подачи выключится, а электромагнитная муфта продольной подачи включится. Так как при изображенной форме копира продольное перемещение копировального, прибора вместе с суппортом вызовет дополнительное смещение щупа, то угол отклонения стержня увеличиться, что вызовет дополнительный поворот рычага и замыкание контактов С2. При этом подается сигнал для включения электромагнитной муфты перемещения поперечного суппорта в обратном направлении. При одновременном включении продольной и поперечной подачи режущий инструмент и копировальный прибор перемещаются по прямой, расположенной под углом к оси обрабатываемой поверхности. Щуп копировального прибора удаляется от копира и угол наклона стержня и рычага уменьшается, контакты С2 размыкаются и подача поперечного суппорта выключается, а продольная подача остается включенной. Продольное перемещение вновь вызывает отклонение щупа и включение поперечной подачи и т. д. В результате поочередного включения продольной и поперечной подач режущий инструмент перемещается по траектории в форме ряда небольших ступеней, величина которых измеряется сотыми долями миллиметра. Форма полученной таким образом линии достаточна близка к форме требующейся образующей. Если образующая и копир имеют уклон, то продольное перемещение копировального прибора вместе с суппортом вызовет уменьшение отклонения щупа и включение перемещения поперечного суппорта по направлению к оси обрабатываемой поверхности, которое будет продолжаться до тех пор, пока увеличившееся отклонение щупа не вызовет выключения поперечной подачи и включения продольной и т. д. Осевое смещение щупа возникает при обработке пространственно сложных поверхностей на фрезерных станках. Так как величина результирующей подачи в значительной мере определяется технологическими соображениями, то при настройке станка должна быть выбрана такая величина задающей подачи, при которой максимальная величина результирующей подачи, получающаяся при максимальных значениях угла 0 не выходила бы за пределы допустимой. На всех других участках профиля работа будет протекать при меньших значениях результирующей подачи, что приведет к потере производительности.
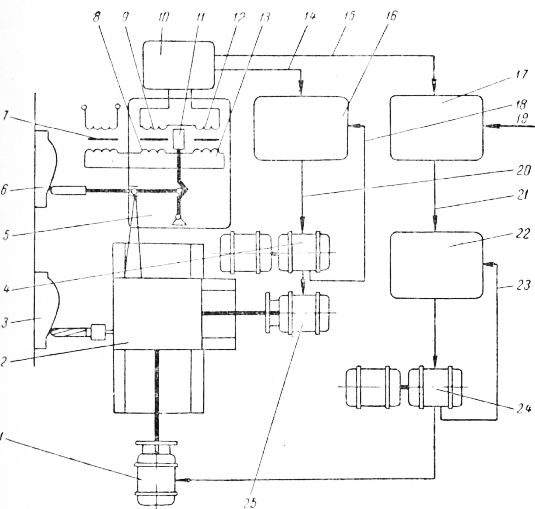
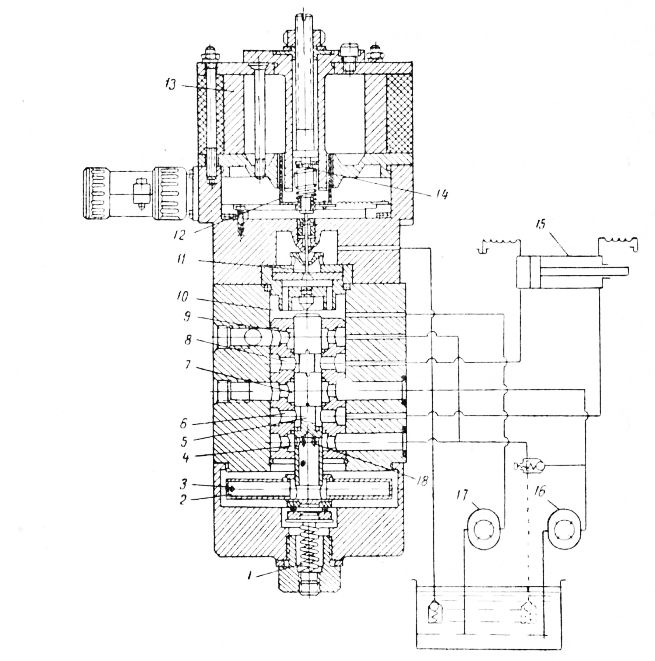
Рис. 3. Копировальный прибор с дифференциальным трансформатором. С целью устранения указанного ограничения в современных станках сигнал, вырабатываемый копировальным прибором, используется для управления как следящей, так и задающей подачами. Управление подачами осуществляется таким образом, что величина результирующей подачи поддерживается постоянной. Необходимым условием воспроизведения плавной траектории является получение непрерывного сигнала управления, вырабатываемого копировальным прибором. Такой сигнал может быть получен при использовании различных типов приборов. На отечественных станках получил распространение прибор с дифференциальным трансформатором. Общая конструкция прибора подобна рассмотренной выше. Копировальный палец может поворачиваться вокруг оси шарика, закрепленного с помощью трех винтов в трубе, связанной с корпусом прибора, а также перемещаться относительно шарика вдоль своей оси. При повороте копировального пальца шарик, заходящий в коническое углубление якоря, подвешенного на пружине, заставляет якорь И перемещаться. Якорь расположен между катушками дифференциального трансформатора. При перемещении якоря зазор между сердечником катушки и якорем возрастает, а между сердечником и якорем уменьшается. Катушка также подвешена на пружине, что позволяет регулировать первоначальный зазор между сердечником катушки и якорем с помощью лимба. Дифференциальный трансформатор смонтирован в корпусе, связанном с трубой. В сеть управления трансформатор включен пучком проводов. Каждая из катушек дифференциального трансформатора имеет две обмотки. Первичные обмотки включены последовательно и получают питание переменным током от трансформатора. Вторичные обмотки включены навстречу друг другу, так что при среднем положении якоря 11 и одинаковом индуктивном сопротивлении обоих катушек результирующее выходное напряжение будет равно нулю. При отклонении якоря от среднего положения изменяется индуктивное сопротивление катушек и вырабатывается сигнал приблизительно пропорциональный величине рассогласования. Если копировальный палец не находится в контакте с копиром, то между якорем и катушкой имеется минимальный зазор. Возникающий при этом сигнал обеспечивает выключение задающей подачи и включение наибольшей следящей подачи, осуществляющей перемещение копировального пальца на копир. При наступлении контакта между щупом копировального пальца и копиром, якорь начнет отклоняться, что вызовет изменение зазоров между якорем и катушками трансформатора. По мере изменения зазора уменьшается следящая подача и увеличивается задающая подача. При среднем положении якоря следящая подача выключается, а задающая приобретает наибольшее значение. При дальнейшем отклонении якоря следящая подача меняет свое направление, а задающая уменьшается. Сигнал, вырабатываемый копировальным прибором, используется для управления электромашинными усилителями, питающими электродвигатели постоянного тока. Один из электродвигателей осуществляет перемещение рабочего органа в направлении оси X, второй — в направлении оси Y. Вместе с рабочим органом перемещается описанный выше прибор. Обрабатываемая деталь и копир расположены на общем основании. Сигнал, вырабатываемый копировальным прибором, поступает к электронному анализатору. В свою очередь, электронный анализатор вырабатывает сигналы в виде напряжения, пропорционального: рассогласованию положения копировального пальца и инструмента, скорости изменения рассогласования и величине интеграла от рассогласования по времени. Использование комплекса сигналов позволяет повысить точность обработки. В цепи управления следящей подачей сигналы, получаемые от электронного анализатора, направляются по связи к усилителю, который питает по связи соответствующие обмотки электромашинного усилителя. В цепи задающей подачи сигналы, поступающие по каналам, направляются к контуру связи, к которому по каналу поступают сигналы от генератора управления. От контура обратной связи сигналы после соответствующей переработки поступают по связи к усилителю, питающему обмотки электромашинного усилителя. Между электромашинными усилителями и усилителями существует обратная связь, осуществляемая по каналам.
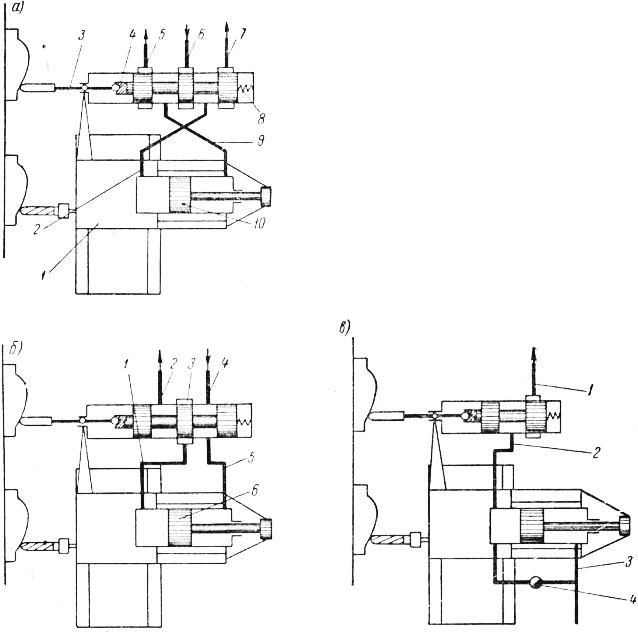
Рис. 4. Схема следящего управления копировально-фрезерным станком. Подобная схема управления используется в широко распространенных копировально-фрезерных станках 6441, имеющих общую компоновку, изображенную на рис. I. 15 первого раздела. Управление при регулируемом гидроприводе. Формы управления при регулируемом гидроприводе отличаются большим многообразием. Такое многообразие обусловлено возможностью использования различных схем поршневых гидроприводов и гидроприводов вращательного движения, разнообразием конструкций копировально-измерительных приборов, представляющих собой аппараты управления гидроприводом, возможностью использования копировально-измерительных приборов, вырабатывающих электрические или другие сигналы управления, которые затем преобразуются в перемещения гидравлических аппаратов управления. Некоторые варианты следящих систем управления гидравлическим регулируемым приводом представлены на рис. 5. Для осуществления задающей подачи может быть использован как гидропривод, так и электропривод или механический привод; в качестве гидропривода следящей подачи использован поршневой гидропривод. Цилиндр поршневого гидропривода связан с подвижными салазками рабочего органа, а шток поршня — с неподвижными направляющими. Золотник, представляющий собой копирйвально-измерительный прибор, также связан с подвижными салазками рабочего органа. Шарик копировального пальца заходит в гнездо золотника и при повороте или осевом смещении копировального пальца смещает золотник в осевом направлении. При среднем положении золотника масло, поступающее по каналу 6, не может попасть к проточкам золотника. Выточки, связанные со сливными каналами, также отделены от проточек золотника. Золотник и его корпус выполнены с такой точностью, что кромки золотника точно совпадают с кромками выточек его корпуса. Поэтому при малейшем смещении золотника его проточки сообщаются с выточками корпуса. При перемещении золотника вправо выточка сообщается с каналом, а выточка — с каналом. Масло поступает в правую полость т илиндра, а из левой полости масло направляется на слив. Рабочий орган перемещается вправо. При перемещении золотника влево выточка соединяется с каналом, а выточка — с каналом, и рабочий орган перемещается влево. Под действием йружины золотник смещен влево и рабочий орган перемещается в этом направлении до момента наступления контакта копировального пальца и копира. Вслед затем происходит смещение золотника, которое продолжается до тех пор, пока величина и направление следящей подачи не обеспечат движение копировального пальца вдоль профиля копира. Следует заметить, что золотник играет в этом случае роль дросселя, сечение которого изменяется при отклонении копировального пальца. Недостатком такой конструкции копировально-измерительного прибора являются технологические трудности, связанные с высокой точностью расположения кромок золотника и выточек. Более простая конструкция копировально-измерительного прибора получается при использовании поршневых двигателей с дифференциальным цилиндром.
Рис. 5. Схемы следящего управления при регулируемом гидроприводе. При схеме, представленной на рис. 5, б, масло поступает по каналу и по каналу направляется в правую полость дифференциального цилиндра. Из левой полости цилиндра масло направляется по каналу к выточке. При среднем положении золотника выточка заперта и рабочий орган стоит неподвижно. Кромки выточки точно совпадают с кромками золотника, поэтому малейшее смещение золотника вызывает перемещение рабочего органа. При смещении золотника вправо выточка сообщается со сливным каналом и масло, поступающее в правую полость цилиндра, перемещает рабочий орган в том же направлении. При смещении золотника влево выточка сообщается с каналом и масло под давлением одновременно поступает в обе полости цилиндра. Вследствие разности активной поверхности, на которую действует давление масла в правой и левой полостях цилиндра, рабочий орган будет перемещаться влево. Изготовление золотника данной конструкции несколько проще. Еще большее упрощение конструкции копировально-измерительного прибора может быть достигнуто при использовании схемы, представленной на рис. 5, в. Масло, поступающее по каналу, направляется одновременно в правую и левую полости цилиндра. Масло, попадающее в левую полость цилиндра, предварительно проходит через дросселирующее отверстие постоянного сечения. Из левой полости масло направляется по каналу к золотнику. Если золотник смещен влево, то проход масла к сливному трубопроводу заперт, давление в левой полости цилиндра повышается и благодаря тому, что активная площадь в левой полости цилиндра больше активной площади в правой полости, рабочий орган начинает двигаться влево. При смещении золотника вправо масло из левой полости поступает на слив и давление в левой полости падает. Благодаря наличию дросселирующего отверстия давление в правой полости сохраняется и рабочий орган перемещается вправо. Золотник может занять такое положение, при котором масло из левой полости будет уходить на слив, но давление в этой полости примет такое значение, при котором силы, действующие на правую и левую крышки цилиндра, окажутся равными и рабочий орган не будет двигаться ни вправо, ни влево. В последней схеме вместо золотника может быть использован клапан той или иной конструкции. Наиболее высокую точность обеспечивает первый вариант, наиболее низкая точность получается при последнем варианте. Однако точность, достигаемая при последнем варианте, удовлетворяет многочисленным видам работ, выполняемых на копировальных станках. Поэтому вследствие простоты конструкции он находит значительное применение на ко-пировально-фрезерных и копировально-токарных станках. Устойчивая работа системы может быть достигнута только при правильно выбранных параметрах: диаметре золотника, сечении дросселирующего отверстия и др. Высокая точность работы следящей системы управления может быть достигнута при использовании золотников с электрогидравлическим управлением. Подачей масла от насоса к поршневому гидродвигателю управляет следящий золотник. От насоса масло-по-ступает в выточку и кромками золотника направляется либо к отверстию, либо к отверстию, от которых оно поступает в ту или иную полость цилиндра. Масло, направляющееся на слив, поступает в выточки. На золотник действует с одной стороны пружина, с другой — давление масла, поступающего от насоса в полость. Выход масла из полости закрывается иглой. В зависимости от положения иглы меняется сечение отверстия, через которое масло сливается из полости, а, соответственно, и давление в полости. В зависимости от давления в полости золотник занимает то или иное положение. С иглой связана катушка, которая расположена в магнитном поле постоянного магнита. Под действием пружины игла стремится опуститься и закрыть выход масла из полости. Положение иглы зависит от напряжения, подаваемого на катушку. Величиной напряжения управляет копировальный прибор.
Рис. 6. Золотник следящей системы с электроуправлением. Для устранения влияния сил трения золотника ему сообщается вращательное движение. Масло, направляющееся на слив, попадает через отверстие в турбинку, закрепленную на золотнике, и представляющую собой ряд трубок с отверстиями. Масло, выходя из отверстий, заставляет золотник вращаться. Золотники этого типа применяются в системах цифрового программного управления, в которых величина напряжения устанавливается в соответствии с заданной программой. Принципы следящего управления при фотоэлектрическом копировании по чертежу. При фотоэлектрическом копировании в качестве копира используется чертеж, выполненный в масштабе 1 : 1 или в увеличенном масштабе. Сигнал управления вырабатывается с помощью фотоэлектрического копировального прибора. Луч от источника света проходит через конденсатор, полупрозрачное зеркало и микрообъектив и проектируется в виде световой точки на чертеже. Лучи, отраженные чертежом, падают на поверхность параболического зеркала и направляются к полупрозрачному зеркалу. Лучи, отраженные полупрозрачным зеркалом, попадают на фотоэлемент. Сигнал, вырабатываемый фотоэлементом, является функцией его освещенности, которая зависит от положения световой точки на чертеже. Если световая точка занимает положение, показанное на чертеже, при котором светлое и темное поле равны друг другу, то скорость следящей подачи равна нулю. При перемещении копировального прибора вместе с рабочим органом в направлении задающей подачи величина темного поля будет возрастать, а светлого — уменьшаться, освещенность фотоэлемента будет падать. Изменение фототока, являющегося сигналом управления, вызовет включение следящей подачи в направлении, обеспечивающем увеличение освещенности. Сигнал, возникающий в копировальном приборе, соответствующим образом преобразуется, усиливается и используется для управления электрическим или гидравлическим приводом. В течение последних тридцати лет было создано большое число различных станков для фотоэлектрического копирования, однако они не получили практического применения вследствие их сложности и сравнительно низкой точности. Реклама:Читать далее:Следящее управление, используемое при позиционных перемещениях рабочих органовСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|