|
|
Категория:
Металлорежущие станки При рассмотренных выше системах управления процессы фиксации программы требуют более или менее значительных трудовых затрат. Последнее обусловлено тем, что для фиксации в программе информации о величине ходов рабочих органов требуется либо придание соответствующих размеров программоносителям (кулачкам, копирам), либо точная настройка большего или меньшего числа путевых упоров, активных измерительных приборов. Основная особенность цифрового программного управления состоит в том, что информация о величине рабочих ходов сообщается системе управления в виде чисел, характеризующих величину требующихся перемещений.
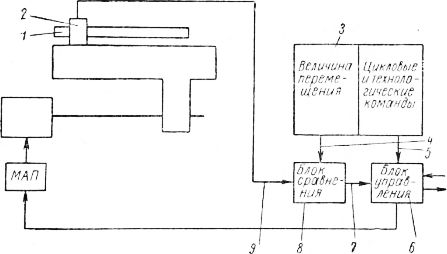
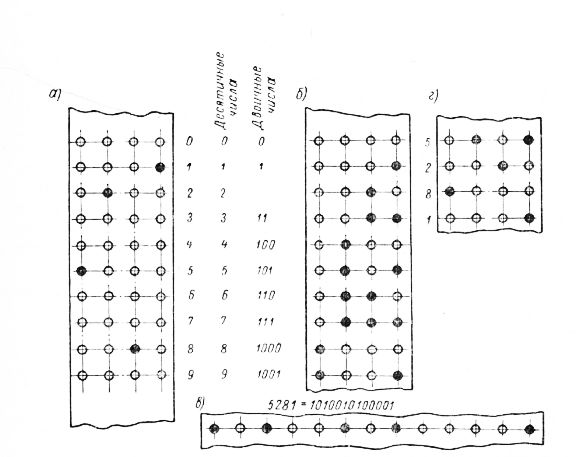
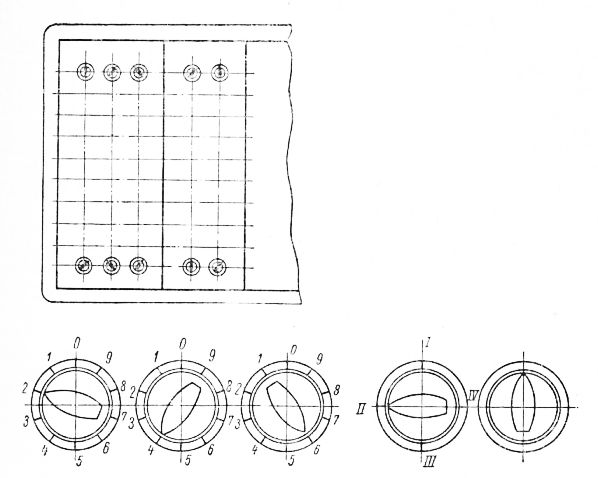
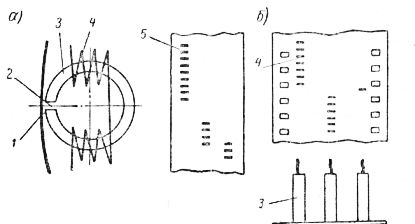
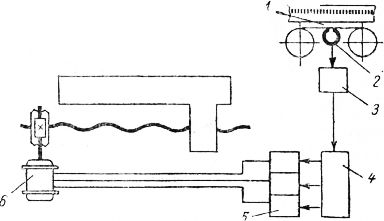
Рис. 1. Блок-схема цифрового программного управления. Число, информация о котором сообщается системе управления (в дальнейшем будем называть его информационным числом), определяется исходя из разрешающей способности системы управления. Разрешающей способностью называется то наименьшее перемещение рабочего органа, которое может быть задано системой управления или зарегистрировано системой обратной связи. В системе цифрового программного управления информация о числе может быть сообщена системе управления в форме той или иной комбинации электрических сигналов. Информация о комбинации электрических сигналов, определяющих величину перемещения для каждого из этапов цикла, должна быть зафиксирована в программе. Параллельно с информацией о величине перемещений для каждого этапа цикла фиксируется также информация о цикловых и технологических командах. Информация о величине перемещений вводится по каналу в блок сравнения системы управления. Информация о цикловых и технологических командах вводится по каналу в блок управления. Блок управления вырабатывает сигналы, поступающие к механизмам автоматического переключения привода рабочего органа. Рабочий орган начинает перемещаться. В процессе перемещения рабочего органа датчик обратной связи, состоящий из неподвижной и подвижной частей, сообщает информацию о перемещении или положении рабочего органа, которая по каналу поступает к блоку сравнения. На основе сравнения задающей информации и информации обратной связи блок сравнения вырабатывает сигналы, поступающие по каналу к блоку управления. На основе этих сигналов блок управления может управлять скоростью перемещения рабочего органа, по выполнении же заданного перемещения подает сигнал для выключения привода. Для фиксации программы могут быть использованы различные виды программоносителей: внутренние программоносители — панели с многопозиционными и двухпозиционными переключателями, штеккерные и кнопочные панели, и внешние программоносители — перфорированные карты и ленты, магнитные ленты, киноленты и др. Информация, зафиксированная на программоносителях, последовательно по окончании каждого очередного этапа цикла, вводится в систему управления станком. С принципами ввода информации, зафиксированной на панелях управления, мы уже сталкивались выше. Внешние программоносители вводятся в специальные читающие устройства, которые преобразуют информацию, зафиксированную на программоносителях, в электрические сигналы. Для получения информации, необходимой для выполнения очередного этапа цикла, программоноситель перемещается внутри читающего устройства. В настоящее время существует большое число различных схем и конструктивных решений, применяемых в системах цифрового программного управления,. Для изучения принципов работы этих систем их целесообразно классифицировать в соответствии с характером задающей информации и методами сравнения задающей информации с информацией обратной связи. В соответствии с этим принципом классификации систему цифрового программного управления металлорежущими станками можно подразделить на следующие основные группы: При число-импульсной суммирующей системе информационное число в форме комбинации электрических сигналов вводится в блок сравнения. При перемещении рабочего органа каждое его последующее перемещение на величину разрешающей способности вызывает поступление электрического сигнала, который по цепи обратной связи направляется к блоку сравнения. В блоке сравнения число сигналов — импульсов обратной связи— сравнивается с информационным числом; когда суммарное число импульсов обратной связи, поступивших в блок сравнения, станет равно информационному числу, то блок сравнения вырабатывает сигнал, поступающий к блоку управления. При число-импульсной следящей системе задающая информация поступает к блоку сравнения в форме следующих друг за другом импульсов, общее число которых равно информационному числу. Скорость перемещения рабочего органа пропорциональна частоте задающих импульсов, так что в интервале между поступлением двух задающих импульсов рабочий орган перемещается на величину разрешающей способности. Поступающий при этом импульс обратной связи гасит ранее поступивший в блок сравнения задающий импульс. Таким образом, задающие импульсы непрерывно гасятся импульсами обратной связи. При появлении в блоке сравнения лишних непогашенных импульсов он вырабатывает сигнал, на основе которого корректируется скорость движения рабочего органа. По окончании серии задающих импульсов, число которых равно информационному числу, движение рабочего органа прекращается. Шаговая число-импульсная система отличается от предыдущей отсутствием импульсов обратной связи. В качестве привода при такой системе могут быть использованы шаговые электродвигатели. При поступлении одного задающего импульса ротор шагового электродвигателя поворачивается на один шаг, а рабочий орган перемещается на величину разрешающей способности. Общая величина перемещения определяется числом импульсов в задающей серии, а скорость — частотой следования импульсов. При цифровом программном управлении с путевым контролем перемещение подвижной части датчика обратной связи относительно неподвижной, возникающее при движении рабочего органа, приводит к замыканию различных комбинаций электрических цепей в системе управления. Каждому положению рабочего органа, смещенного относительно предыдущего положения на величину разрешающей способности, соответствует определенная комбинация замкнутых электрических цепей. Комбинации изменяются по определенному закону от исходного положения рабочего органа, которое является началом отсчета. При подготовке программы необходимо определить положения, которые должен занимать рабочий орган относительно начала отсчета в конце каждого этапа цикла. Необходимая информация фиксируется в виде информационного числа, определяющего величину перемещения из начального исходного в заданное положение. При вводе этой информации подготовляется комбинация цепей, которые замыкаются, когда рабочий орган приходит в заданное положение, независимо от того, из какой точки он начал двигаться. В аналоговых схемах заданное перемещение представляется в виде какой-либо другой физической величины, например напряжения электрического тока. Перемещению рабочего органа на величину разрешающей способности соответствует изменение напряжения на какую-то определенную величину AU. Информационное число, зафиксированное в программе, определяющее величину перемещения от начала отсчета, преобразуется с помощью специального блока системы управления — преобразователя представления — в напряжение. Датчик обратной связи вырабатывает сигнал в виде напряжения, пропорционального фактической величине перемещения от начала отсчета. В блоке сравнения сравниваются задающее напряжение и напряжение обратной связи; при равенстве их абсолютных значений подается сигнал управления. Принципы действия фазочувствительной системы рассматриваются ниже. Характерной особенностью всех систем цифрового программного управления, за исключением шаговой число-импульсной системы, является наличие в системе датчиков обратной связи. Характер сигнала, подаваемого датчиком, зависит от того, в какой системе используется датчик, и от типа самого датчика. Однако независимо от характера сигнала датчики обратной связи могут быть разбиты так же, как отсчетные устройства, на кинематически связанные с приводом рабочих органов, кинематически связанные с рабочим органом и непосредственно связанные с рабочим органом. Все сказанное выше относительно различных связей отсчетных устройств с рабочим органом полностью относится к аналогичным связям датчиков. Следует заметить, что влияние на точность перемещений зазоров в кинематических цепях привода датчиков может быть устранено при соответствующем построении автоматического цикла движений, который должен обеспечивать постоянное направление движения рабочего органа при подходе к точке остановки. В тех случаях, когда в соответствии с программой рабочий орган подходит к точке остановки, двигаясь в обратном направлении, его перемещают на величину несколько превосходящую требуемую, а затем возвращают назад на величину, равную перебегу. Такая схема движений может быть использована при перемещении стола и шпиндельной бабки на расточных станках, при обработке резцом ступенчатых поверхностей на станках токарной группы и т. п. Схемы различных датчиков описаны ниже применительно к соответствующим системам цифрового программного управления. При составлении программы для рассмотренных систем цифрового программного управления необходимо зафиксировать информационное число или серию импульсов, число которых равно информационному числу. В иной форме фиксируется программа при фазочувствительной системе цифрового программного управления. При фиксации информационного числа оно может быть представлено в той или иной системе счисления: десятичной, двоичной, двоичнодеся-тичной и др. Системой счисления в значительной мере определяется форма кода, который может быть использован для фиксаций информации. Различные формы кода, а соответственно и системы счисления, обладают соответствующими достоинствами и недостатками, которые проявляют себя в зависимости от вида используемого программоносителя, читающего устройства и т. п. Информационное число может быть преобразовано системой управления в серию импульсов. Серия импульсов может быть также задана в унитарном коде, при котором число информационных знаков равно информационному числу. Программоносители, фиксация информации и чтение программы. Панели управления. При десятипозиционных переключателях информационное число представляется в десятичной системе счисления. Каждая строчка переключателей панели управления соответствует одному этапу цикла. Левая группа переключателей служит для фиксации информации о величине перемещения, правая — о характере цикловых команд I, II, III, IV. С помощью группы переключателей, показанных на рис. III. 46 в большом масштабе,зафиксировано число 246. При разрешающей способности системы 0,1 мм данной информации соответствует перемещение рабочего органа на 24,6 мм, при разрешающей способности 1 — 246 мм, при разрешающей способности 10 — 2460 мм. Чем выше разрешающая способность и больше максимальная величина хода, тем больше переключателей должно быть в строчке. На панелях с двухпозиционными и кнопочными переключателями и штепсельных коммутаторах информация фиксируется в двоичном коде так же, как на перфокартах и перфолентах. Перфокарты и перфоленты. Для фиксации программы на перфокартах и перфолентах применяются различные виды кода. Для фиксации числа в десятичном коде необходим участок перфокарты или перфоленты, состоящий из десяти строк. Каждая из строк соответствует одной из цифр от 0 до 9. Количество вертикальных дорожек равно количеству знаков в числе. Так, для фиксации четырехзначного числа необходимы, как это показано на рис. 3, а, четыре дорожки, для фиксации семизначного числа потребовалось бы семь дорожек и т. д.
Рис. 3. Фиксация программы на перфорированной карте
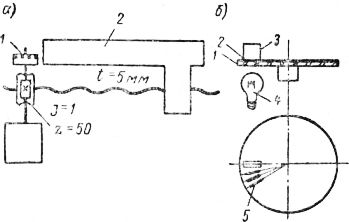
Рис. 4. Панель управления с десятипозиционными переключателями Десятичный код отличается наглядностью, так как он позволяет визуально прочесть зафиксированное число. Существенным недостатком десятичного кода является значительное увеличение размеров программоносителя и усложнение читающего устройства, вследствие чего эта форма кода практически не используется. Двоичный код базируется на двоичной системе счисления, в которой имеется всего две цифры — единица и ноль. Рассмотрим, как могут быть представлены различные числа в двоичной системе счисления. Обратимся вновь к десятичной системе. В десятичной системе единица, стоящая в разряде с номером п, обозначает число, равное 10га-1; например, единица, стоящая во втором разряде (10), обозначает 101, единица, стоящая в третьем разряде (100), обозначает 102, единица, стоящая в четвертом разряде (1000), обозначает 103 и т. д. Аналогично в двоичной системе единица, стоящая в разряде п, обозначает число, равное 2”“1; например единица, стоящая во втором разряде (10), обозначает 21, единица, стоящая в третьем разряде (100), обозначает 22, единица, стоящая в четвертом разряде (1000), обозначает 23 и т. д. Изображение цифр от 0 до 9 десятичной системы в двоичной и их обозначение на перфорированной ленте приведено на рис. III. 47, б. Цифра 1 записывается в обеих системах одинаково. Цифра 2 записывается в двоичной системе, как 1 во втором разряде и 0 в первом. Цифра 3 записывается как сумма чисел 2 и 1, т. е. как 1 во втором и 1 в первом разрядах. Цифра 4 записывается, как 1 в третьем разряде. Цифра 5 записывается как сумма чисел 4 и 1, т. е. как 1 в третьем и 1 в первом разрядах. Любое число можно представить как сумму чисел, каждое из которых является степенью числа 2. Например, число 5281 равно 4096 + 1024 + + 128 + 32 + 1. Каждое из чисел, составляющих число 5281, является степенью числа 2 : 5281 = 212 + 210 + 27 + 28 + 2°. Для того чтобы видеть, какие степени числа 2 отсутствуют в этом числе, запишем его в виде: 5281 = 1.2” + 0.211 + 1.2l0[+ 0.29 + 0.28 + 1.2’ + 0.26 + + 1.2® + 0.24 + 0.23 + 0.22 + 0.21 + 1.2°. Соответственно в двоичной системе число 5281 запишется в виде 1010010100001, а на перфоленте изобразится в форме, представленной на рис. III. 47, в. Как видно изображение числа 5281 в двоичной системе требует всего одной строчки, которая имеет 13 точек для пробивки отверстий, в отличие от десятичной, при которой требовалось 10 строчек и 40 точек для пробивки отверстий. Таким образом, при двоичном коде величина программоносителя может быть значительно уменьшена, а конструкция читающего устройства упрощена. Благодаря отмеченным достоинствам двоичный код находит большее распространение. Одним из недостатков двоичного кода является невозможность (или сложность) визуального определения зафиксированного числа. При двоично-десятичном коде (код 8421) каждая цифра числа, представленного в десятичной системе, записывается в двоичной системе на отдельной строчке. Так, для записи числа 5281 потребуется четыре строчки. В первой строчке записана цифра, во второй, в третьей 8, в четвертой в двоичной системе. Число, зафиксированное в двоично-десятичном коде, можно прочесть визуально. Объем информации при этой системе кодирования несколько больше, чем при двоичном коде и значительно меньше, чем при десятичном. Перфокарты и перфоленты изготовляются с помощью специальных устройств — перфораторов. Конструкции перфораторов чрезвычайно многообразны, от ручных, на которых каждое отверстие пробивается непосредственным нажимом на пуансон рукой, до клавишных. В зависимости от конструкции перфоратора либо требуется предварительный перевод числа из десятичной системы в двоичную, для чего используются переводные таблицы и линейки, либо в перфоратор вводится информационное число в десятичной системе, а при пробивке это число автоматически представляется в двоичном коде. Для чтения программы, т. е. для преобразования информации, зафиксированной на перфокартах или перфолентах, в электрические сигналы, применяются как контактные, так и бесконтактные методы. При одной из форм контактного метода перфорированная карта или лента лежит на поверхности контактной пластины. На поверхность карты опираются контактные щетки 3, каждая из которых представляет собой пучок стальных проволок, торцовая поверхность которого отшлифована под углом. В процессе чтения программы строчки программоносителя последовательно подводятся к щеткам. Щетки, совпадающие с отверстиями программоносителя, приходят в соприкосновение с контактной пластиной, к которой подведен ток, и через эти щетки будут поданы электрические сигналы.
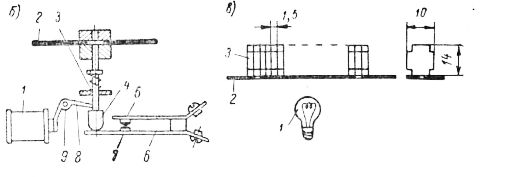
Рис. 4. Схемы читающих устройств. Скольжение щеток по поверхности программоносителя при его перемещении вызывает износ. Вариант читающего устройства, представленный на рис. 4, б, исключает скольжение щеток по поверхности программоносителя. При перемещении перфокарты ощупывающие штифты опускаются вниз с помощью электромагнита, который поворачивает качающуюся рамку. Последняя, поворачиваясь вокруг оси, нажимает на выступы штифтов и опускает их вниз. Штифты, нажимая на пружины, размыкают контакты. Когда очередная строчка перфокарты совмещается с линией штифтов, электромагнит освобождает рамку, и штифты под действием пружины перемещаются вверх. Перемещению штифтов препятствует перфокарта, и переместиться могут только те штифты, которые совпадают с отверстиями, пробитыми в данной строчке перфокарты. Контакты, расположенные под штифтами, совпадающими с отверстиями перфокарты, замыкаются, и от читающего устройства в систему управления поступают соответствующие сигналы. Для чтения информации, зафиксированной на перфокартах или лентах, применяются фотоэлектрический и пневматический методы. При фотоэлектрическом методе с одной стороны перфокарты располагается источник света, с другой — фотосопротивления. Через отверстия перфокарты свет падает на фотосопротивления. От освещенных фотосопротивлений поступают электрические сигналы, которые обычно нуждаются в дополнительном усилении. При пневматическом читающем устройстве сжатый воздух, поступающий по трубе в камеру, попадает через отверстия перфокарты и плиты в трубки, каждая из которых подведена к датчику сигналов. Для транспортирования перфокарт и перфолент в читающих устройствах применяются различные транспортирующие механизмы с собственными приводами. Следует заметить, что информационное число, зафиксированное на перфокарте или перфоленте, может быть преобразовано с помощью генераторов импульсов в серию импульсов. Магнитные и киноленты. Магнитная лента, аналогичная применяемой в магнитофонах, изготовляется из ацетилцеллюлозы толщиной 0,03 мм, на которую наносится слой ферромагнитной эмульсии. Для записи программы на магнитной ленте служат электромагнитные головки. Сердечник катушки состоит из двух полуколец, между концами которых имеется зазор шириной 0,01—0,02 мм. На сердечнике помещаются катушки. В процессе записи программы магнитная лента движется с равномерной скоростью мимо зазора сердечника. При пропускании переменного тока требующейся частоты через обмотки электромагнитной головки в зазоре возникает переменное магнитное поле, вследствие чего на равномерно движущейся ленте образуются поперечные «магнитные штрихи». Интервалы между штрихами при постоянной скорости ленты зависят от частоты переменного тока. Магнитные штрихи можно обнаружить, насыпав на ленту железные опилки. Запись программы производится с помощью соответствующего программирующего устройства. Программа представляет собой серию магнитных штрихов. Число штрихов равно информационному числу. При воспроизведении программы лента с такой же скоростью, как и при записи, протягивается мимо аналогичной читающей магнитной головки; при этом вследствие перемещения магнитных штрихов перед зазором в сердечнике возникает переменный магнитный поток, возбуждающий электродвижущую силу в обмотках катушки. Каждому штриху соответствует один импульс тока; при воспроизведении программы импульсы следуют один за другим. Импульсы нуждаются в усилении. Рассмотренная форма фиксации программы может быть использована в число-импульсных следящей и шаговой системах. По ширине ленты размещается несколько дорожек, на каждой из которых может быть зафиксирована программа перемещений одного из рабочих органов станка. Кинолента в ряде случаев используется как обычная перфолента. Возможна также запись программы черными штрихами. При движении кинопленки в читающем устройстве штрихи проходят мимо фотосопротивлений, освещенных источником света. В момент прохождения штриха мимо фотосопротивления луч света прерывается и возникает электрический сигнал.
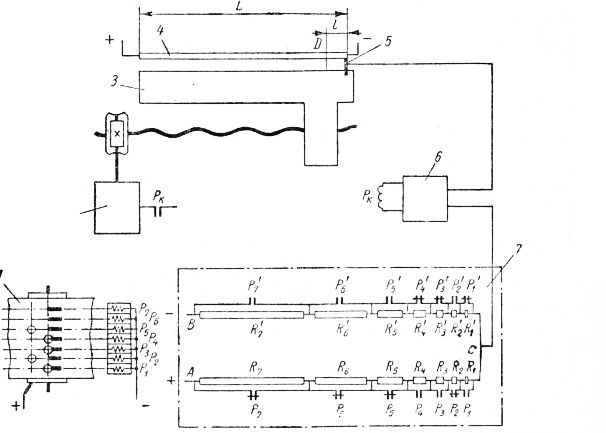
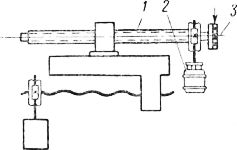
Рис. 5. Фиксация и чтение программы: В практике применяются также и другие виды программоносителей. Число-импульсные системы. Число-импульсные системы, суммирующая и непрерывного действия, имеют ряд общих элементов, к числу которых в первую очередь относятся датчики импульсов обратной связи. Датчики импульсов обратной связи. При высокой разрешающей способности системы, которая для координатнорасточных станков достигает 0,001 мм, а для других типов станков находится в интервале 0,01—0,1 мм, очередной импульс должен подаваться при перемещении рабочего органа на весьма малую величину, что вызывает определенные трудности при создании датчиков, отвечающих требованиям высокой разрешающей способности и точности. Одним из решений, которое позволяет получить высокую разрешающую способность, является применение датчиков, кинематически связанных с приводом рабочего органа. Датчик представляет собой обычный коллектор, сидящий на валу червяка привода рабочего органа. При вращении вала пластины коллектора контактируют со щеткой, скользящей по поверхности коллектора, и в момент контакта Если червячное колесо имеет 50 зубцов, датчик — десять пластин, а ходовой винт — шаг 5 мм, то один импульс будет поступать при перемещении рабочего органа на 0,01 мм. Вместо коллектора можно использовать бесконтактный фотоэлектрический датчик, который представляет собой диск с прорезями. С одной стороны диска расположен источник света, ас другой — фотосопротивление. При вращении диска фотосопротивление периодически освещается в момент прохождения перед ним прорези, сделанной в металлическом слое, при этом возникает импульс тока. Импульсы обратной связи могут быть также получены с помощью рассмотренного выше индуктивного датчика, применяемого в отсчетных устройствах. Рассмотренные датчики могут быть использованы как кинематически связанные с рабочим органом. Для получения высокой разрешающей способности передача, связывающая рабочий орган с датчиком, должна иметь большое повышающее передаточное отношение, что вызывает трудности при конструктивном оформлении подобных датчиков. Конструкции датчиков, непосредственно связанных с рабочим органом, весьма разнообразны: фотоэлектрические датчики с металлическими и стеклянными штриховыми шкалами, фотоэлектрические датчики с дифракционными решетками, индуктивные датчики, индуктосины и др.
Рис. 6. Схемы датчиков импульсов обратной связи, кинематически связанных с приводом рабочего органа. Однако при такой простейшей схеме представляется весьма затруднительным обеспечить высокую разрешающую способность, так как при малом интервале между штрихами и соответствующей толщине штриха нельзя получить четких импульсов обратной связи. Обычно интервал между штрихами шкалы равен одному миллиметру. Для получения высокой разрешающей способности применяют датчики обратной связи более сложной конструкции, которые по аналогии с отсчетными устройствами могут быть названы двухшкаль-ными датчиками. Изображение штрихов стеклянной или металлической линейки с помощью объектива проецируется на экран. При этом интервал между штрихами на экране в 50—100 раз больше интервала между штрихами на линейке. Перед экраном располагается фотоэлектрический датчик. При движении рабочего органа штрихи линейки, спроецированные на экран, перекрывают фотоэлектрический датчик, в результате чего возникает импульс тока.
Рис. 7. Фотоэлектрический датчик. Высокая разрешающая способность достигается путем предварительного смещения фотодатчика относительно экрана с помощью вспомогательной системы цифрового программного управления. При смещении фотодатчика относительно начального положения, при котором проекция штриха совпадала с фотодатчиком, первый импульс последует после того, как штрих переместится на величину смещения фотодатчика, а рабочий орган — на величину меньше одного миллиметра. Общая величина перемещения будет складываться из этого дополнительного перемещения, определяемого смещением датчика, и перемещения, определяемого числом импульсов. Величина смещения датчика определяется дробной частью общей величины перемещения рабочего органа и масштаба увеличения на экране. В зависимости от масштаба увеличения перемещению рабочего органа на 0,01 мм соответствует смещение датчика на 0,5—1 мм. Таким образом, высокая разрешающая способность системы цифрового программного управления перемещениями рабочего органа может быть получена при низкой разрешающей способности системы программного управления смещением фотодатчика. Каретка фотодатчика получает движение от специального привода с электродвигателем. Величина смещения задается в программе информационным числом, равным числу сотых (или тысячных) долей в дробной части общей величины перемещения рабочего органа. Импульсы обратной связи при перемещении фотодатчика подаются датчиком обратной связи. От системы программного управления перемещением фотодатчика не требуется особо высокая точность. В качестве датчика обратной связи, непосредственно связанного с рабочим органом, может быть использован индуктивный винт, применяемый в описанном выше отсчетном устройстве. При перемещении рабочего органа с помощью индуктивного винта формируются сигналы в виде синусоидально изменяющегося тока. Так как единичный сигнал поступает при перемещении рабочего органа на сравнительно большую величину, то такая система имеет низкую разрешающую способность. Высокая разрешающая способность может быть получена с помощью механизма предварительного поворота индуктивного винта, как это имело место в описанном выше отсчетном устройстве. Предварительный поворот индуктивного винта осуществляется специальным приводом с электродвигателем при помощи вспомогательной системы цифрового программного управления с датчиком обратной связи. Датчики обратной связи с индуктивными винтами используются на координатнорасточных станках с цифровым программным управлением завода им. С. М. Кирова в Одессе. Высокая разрешающая способность может быть получена также с помощью датчика обратной связи с дифракционными решетками. Дифракционная решетка представляет собой прозрачную линейку, на которой нанесены черные штрихи, чередующиеся с просветом (растры), либо У-образные углубления. На одном миллиметре решетки, предназначенной для датчиков обратной связи станков, размещается 100—200 штрихов. Штрихи располагаются перпендикулярно направлению движения. Впереди подвижной решетки располагается небольшой отрезок неподвижной решетки, штрихи которой расположены под небольшим углом. Через обе решетки проходит луч света, создаваемый соответствующим источником. Вследствие дифракции света на неподвижной решетке появляется ряд поперечных темных полос. Во время движения решетки эти полосы перемещаются сверху вниз или снизу вверх в зависимости от направления движения решетки. При перемещении решетки на величину шага штрихов поперечные полосы перемещаются на величину своего шага, который равен нескольким миллиметрам. Перед решеткой помещается фотоэлектрический датчик. При перемещении полос датчик то освещается, то затемняется, в результате чего возникает синусоидально изменяющийся электрический сигнал, который с помощью соответствующей электронной аппаратуры преобразуется в импульсы обратной связи.
Рис. 8. Индуктивный датчик.
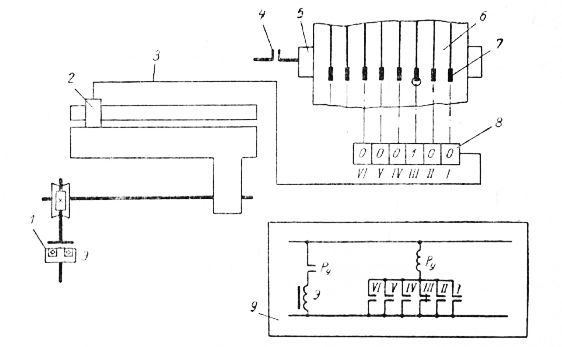
Рис. 9. Датчик с дифракционной решеткой. Число-импульсная суммирующая система. Представленная на рис. 10 блок-схема дает представление о принципах действия число”-импульсной суммирующей системы. Привод перемещения рабочего органа включается электромагнитной муфтой, программа движений задается на перфокарте, импульсы обратной связи генерируются датчиком. Информация о величине перемещений фиксируется двоичным кодом на шести дорожках перфокарты. Две дорожки используются для фиксации цикловых и технологических команд. Информация считывается щетками. Через отверстия перфокарты щетки контактируют с поверхностью пластины, которая в момент считывания программы подключается к сети с помощью контактов. Щетки, считывающие информацию о величине перемещения, подключены к ячейкам /—VI двоичного счетчика 8, представляющего собой запоминающее и сравнивающее устройство. Ячейки могут быть построены на основе электронных ламп, полупроводниковых элементов, реле и др. Работа ячеек двоичного счетчика рассматривается ниже. Ячейки, щетки которых в момент ввода информации были подключены к сети, переводятся в состояние, а остальные ячейки находятся в состоянии 0. Ячейки /—VI управляют контактами /—VI блока управления. Через контакты I—VI включается цепь питания обмотки реле Ру, контакты которого включают электромагнитную муфту Э привода. Если одна из ячеек счетчика пришла в состояние, то реле Ру срабатывает, включается электромагнитная муфта и начинается движение рабочего органа. От датчика по каналу к двоичному счетчику 8 поступают импульсы обратной связи. При поступлении каждого очередного импульса информационное число, зафиксированное в счетчике, уменьшается на единицу. Когда число импульсов обратной связи становится равным информационному числу, все ячейки счетчика приходят в состояние, цепь питания обмотки реле Ру размыкается и контакты реле отключают электромагнитную муфту. Движение рабочего органа прекращается. По команде блока управления перфокарта перемещается на один шаг и начинается новый этап цикла.
Рис. 10. Блок-схема число-импульсной суммирующей системы.
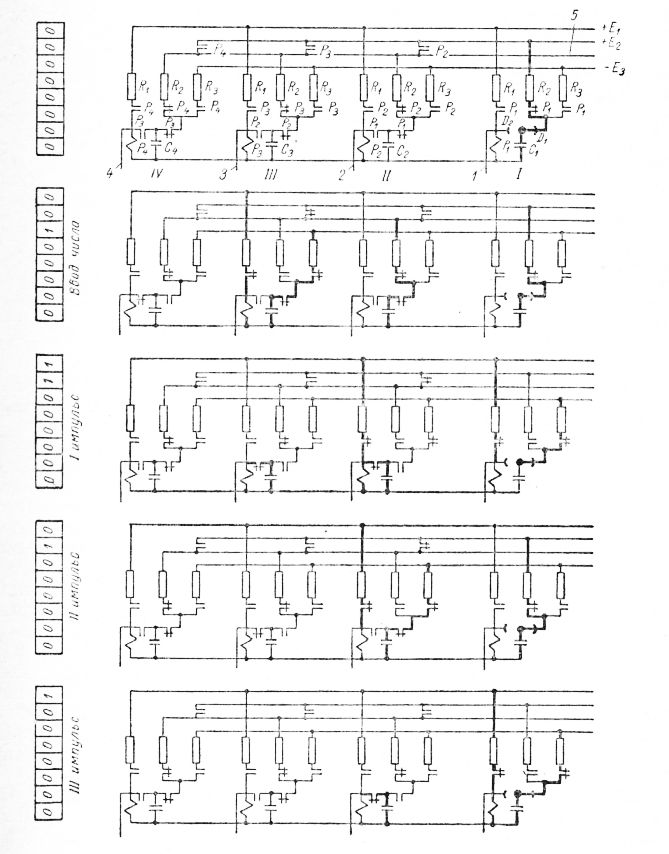
Рис. 11. Схема работы двоичного релейного счетчика. Если конденсатор имел отрицательный заряд, то при подключении его к обмотке реле, стоящего на самопитании, через обмотку идет ток противоположного направления и реле отключается. Подключение конденсатора к положительному или отрицательному источнику питания осуществляется с помощью контактов реле данной ячейки. Если реле выключено, то конденсатор подключен к полОжительному источнику питания, если реле включено, то конденсатор подключен к отрицательному источнику питания. Подключение конденсатора к обмотке реле осуществляется с помощью контактов реле младшей ячейки. Если реле младшей ячейки выключено, то конденсатор отключен от обмотки реле и подключен к сети питания, если реле младшей ячейки включено, то конденсатор отключен от сети питания и подключен к обмотке реле данной ячейки. Подключение конденсатора первой ячейки осуществляется контактами датчика обратной связи. При перемещении рабочего органа на величину разрешающей способности размыкаются контакты Dзамыкаются контакты D а, размыкаются контакты D2 и вновь замыкаются контакты D1. В положении 0 реле всех ячеек выключены, конденсаторы подключены к положительному источнику питания, но источник питания отключен от сети питания контактами реле Р2—Рп. Для ввода информации служат цепи 1,2,3,4, . . ., которые подключены к щеткам читающего устройства. Если через щетку проходит ток, то соответствующее реле срабатывает. Предположим, что информационное число равно 4 или в двоичной системе 100. При вводе этого числа в счетчик срабатывает реле Р3 ячейки III. Реле Р3 становится на самопитание, а его нормально открытые контакты замыкаются и подключают конденсатор С3 к отрицательному источнику питания Е3. Одновременно другая пара нормально открытых контактов Р3 подключает положительный источник питания Е2 к цепи 5, а третья пара включает цепь питания обмотки реле Ру. Рабочий орган начинает двигаться. При перемещении рабочего органа на величину разрешающей способности датчик обратной связи производит первый цикл переключений в ячейке счетчика, в результате чего в счетчике вместо двоичного числа 100 (4) остается число 11 (3). К моменту начала работы датчика конденсатор Сх заряжен положительным зарядом. При замыкании контактов срабатывает реле Рх, которое становится на самопитание. Ячейка I переходит из состояния 0 в состояние 1. Одновременно цепь питания конденсатора Сх подключается к отрицательному источнику питания и при замыкании контактов Dx конденсатор Сх получает отрицательный заряд. Включение реле Р1г в свою очередь, вызывает соответствующие переключения в ячейке II. Конденсатор С2, который был заряжен положительно, подключается нормально открытыми контактами Рх к обмотке реле Р 2, которое срабатывает и становится на самопитание. Ячейка переходит из состояния 0 в состояние 1. Нормально открытые контакты реле Р2 подготовляют цепь питания конденсатора С2 от отрицательного источника питания. Нормально открытые контакты реле Р2, находящиеся в ячейке III, подключают отрицательно заряженный конденсатор С3 к обмотке реле Р3, которое при этом выключается. Ячейка III переходит из состояния 1 в состояние 0. Характер дальнейших переключений, происходящих при поступлении второго и третьего импульсов, можно проследить по схемам, представленным на рис. III. 55. При поступлении четвертого импульса ячейка I также переходит в состояние 0 и рабочий орган останавливается. Как уже указывалось выше, при выключении привода с помощью кулачковых и фрикционных муфт или путем отключения электродвигателя высокая точность останова может быть достигнута только резким замедлением скорости хода перед остановкой, что во многих случаях ведет к значительным потерям производительности. При число-импульсной системе для включения и выключения привода могут быть использованы однооборотные муфты. При одном обороте муфты рабочий орган перемещается на величину разрешающей способности. Величину перемещения можно задать, задавая число оборотов однооборотной муфты. Сделав заданное число оборотов, вал муфты останавливается с весьма высокой точностью. Отклонение в угловом положении вала не превышает 1—2°. Однако при высокой разрешающей способности системы и значительной скорости хода однооборотная муфта должна была бы делать очень большое число оборотов в минуту. Для того чтобы избежать чрезмерного повышения числа оборотов и использовать преимущества, связанные с высокой точностью останова, однооборотные муфты могут быть применены совместно с.дифференциально суммирующим приводом.
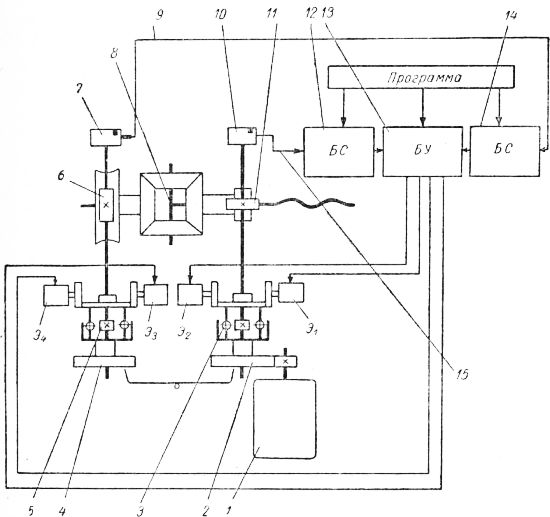
Рис. 11. Блок-схема число-импульсной системы цифрового программного управления с дифференциально-суммирующим приводом. Рабочий орган получает движение от валика 8 сателлитов конического дифференциала. Коническому дифференциалу вращение передается с одной стороны от шестерни 4 через реверсивную однооборотную роликовую муфту и через передачу, с другой — от шестерни через аналогичную муфту и винтовые шестерни. Шестерни получают вращение от реверсивного привода 1. Однооборотные муфты включаются и выключаются с помощью электромагнитов Эг—Э4 по сигналам, поступающим от блока управления. За один оборот муфты рабочий орган перемещается на величину в 10 (или от 20 до 50) раз меньшую, чем при одном обороте муфты 3, т. е. при включении муфты 3 система работает с низкой разрешающей способностью, при включении муфты 5 —с высокой разрешающей способностью. Обе муфты включаются одновременно. Информация о величине перемещения состоит из двух информационных чисел, первое из которых получается как частное от деления величины перемещения на величину низкой разрешающей способности, а второе — как частное от деления остатка на величину высокой разрешающей способности. Первое число вводится в блок сравнения (БС) 12, второе — в блок сравнения (БС) 14. Импульсы обратной связи поступают: к блоку 12 — от датчика 10 по связи 15, к блоку 14 — от датчика по связи. Поскольку перемещение, заданное с высокой разрешающей способностью, происходит параллельно с перемещением, заданным с низкой разрешающей способностью, то малая скорость вращения однооборотной муфты практически не вызывает увеличения затрат времени на перемещение.
Рис. 12. Блок-схема число-импульсной следящей системы. Число-импульсные системы с дифференциально-суммирующим приводом и однооборотными муфтами находят применение на токарных станках с цифровым программным управлением. Повторная точность такой системы при разрешающей способности 0,01 мм находится в пределах 0,005 мм. Число-импульсная следящая система. Серия импульсов, число которых равно информационному числу, может быть зафиксирована на магнитной ленте. Сигналы, считанные магнитной головкой, поступают к определителю направления перемещения, который расшифровывает полученные сигналы и определяет заданное в программе направление перемещения рабочего органа. Одновременно сигналы поступают к регулятору скорости, который создает напряжение, пропорциональное частоте сигналов. Сигналы регулятора скорости усиливаются в усилителе 8 и направляются к приводу, который сообщает движение рабочему органу. От определителя направления импульсы поступают также к реверсивному счетчику. К этому же счетчику поступают сигналы обратной связи. Импульсы обратной связи генерируются датчиком обратной связи, в качестве которого на приведенной схеме использован датчик с дифракционными решетками. Сигналы обратной связи также проходят через определитель направления. В реверсивном счетчике задающие сигналы гасятся сигналами обратной связи; таким образом, в счетчике находится алгебраическая сумма задающих сигналов и сигналов обратной связи. Счетчик вырабатывает сигнал, пропорциональный этой сумме, т. е. числу импульсов, находящихся в счетчике. Этот сигнал поступает к усилителю 8 и изменяет скорость движения таким образом, чтобы уменьшить рассогласование между числом задающих импульсов и числом импульсов обратной связи, поступивших в счетчик. Шаговая число- импульсная система. Рабочий орган получает движение от шагового электродвигателя. Серия импульсов, зафиксированная на магнитной ленте, считывается магнитной головкой, пройдя через усилитель считывания, поступает к распределителю импульсов, который направляет сигналы к отдельным обмоткам шагового электродвигателя. Сигналы предварительно проходят через силовые усилители.
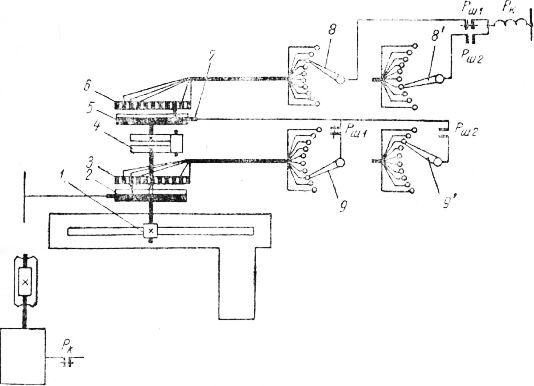
Рис. 13. Блок-схема шаговой число-импульсной системы. Системы с путевым контролем. Схема с десятипо-зиционными переключателями. Подготовка электрических цепей осуществляется десятипозиционными переключателями 8, 9 8’, 9’ и т. д, а замыкание в момент прихода рабочего органа в заданное положение — с помощью электроконтактного переключателя, который получает движение от реечной шестерни. Вместе с реечной шестерней вращается диск со щеткой, которая скользит по пластинам неподвижного коллектора. Каждая из десяти пластин коллектора подключена к одному из контактов десятипозиционного переключателя. В свою очередь, скользящий контакт переключателя присоединен к щеточному диску, щетка которого скользит по пластинам неподвижного коллектора. Пластины коллектора подключены к контактам переключателя. Цепь обмотки управляющего реле Рк замыкается через диск, коллектор, переключатель, диск, коллектор, переключатель8 и контакты реле Рш. Предположим, что переключатели установлены так, что к переключателю подключен контакт № 3, а к переключателю — контакт № 8. Цепь питания обмотки управляющего реле Рк окажется замкнутой в том случае, если щетка диска совпадет с пластиной № 3 коллектора, а щетка с пластиной № 8 коллектора.
Рис. 14. Блок-схема цифрового программного управления с путевым контролем при задании программы десятипозиционными переключателями. Диск получает движение от диска через зубчатую передачу. Благодаря соответствующей конструкции передачи диск поворачивается скачкообразно на угол, равный углу между пластинами коллектора при повороте диска на один оборот. Таким образом, щетка диска 5 совпадет с пластиной №8 коллектора после оборотов диска, а щетка диска совпадет с пластиной № 3 коллектора после того, как диск повернется еще на 0,3 оборота. В этот момент обмотка реле Рк будет подключена к сети и поступит команда для выключения привода. Если диск делает один оборот при перемещении рабочего органа на 10 мм, то к моменту остановки рабочий орган переместится на 83 мм. Соответственно переключатель служит для установки единиц, а переключатель — десятков миллиметров. Для настройки величины перемещения в соответствии со следующим этапом цикла служит вторая группа переключателей 9’ и 8’. Соответствующая группа переключателей подключается к обмотке реле Рк при переходе к следующему этапу цикла с помощью шагового реле Рш.
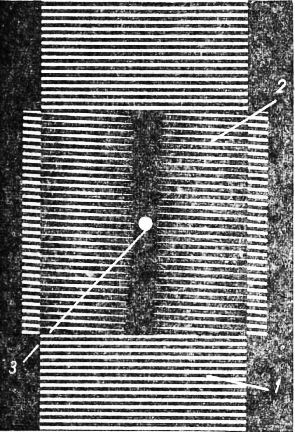
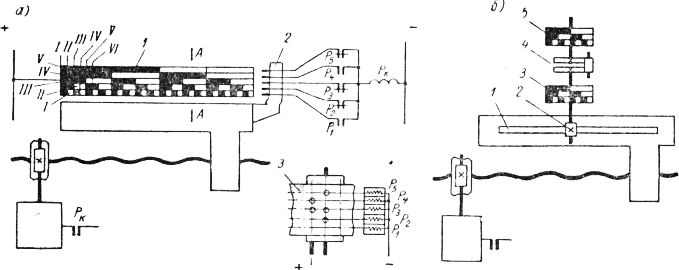
Рис. 15. Блок-схема цифрового программного управления с кодовой линейкой (а) и кодовым барабаном (б). Схема с кодовой линейкой или барабанами. Кодовая контактная линейка имеет ряд дорожек по числу разрядов двоичной системы счисления, необходимых для задания максимального возможного перемещения рабочего органа при принятой разрешающей способности. Контактная дорожка представляет собой чередующиеся контактные выступы, показанные на рисунке черным, и изолированные участки, показанные на рисунке белым. По контактной линейке перемещаются щетки, связанные с подвижным рабочим органом. Линейку можно рассматривать как состоящую из ряда строк. Ширина каждой строки равна ширине одного интервала первой дорожки. Каждая строка состоит из клеток, число которых равно числу дорожек. Комбинации контактных и изолированных клеток в каждой строке различны, и при переходе щеток с одной строчки на другую меняется комбинация замкнутых цепей. Таким образом, разрешающая способность системы равна ширине строчки. Контактные и изолированные клетки располагаются в каждой строчке в соответствии с двоичной системой счисления, при этом контактный участок соответствует цифре 0, а изолированный — цифре 1. В первой строчке фиксируется число 0 и все клетки первой строчки являются контактными. Во второй строчке фиксируется число и клетка, расположенная на первой дорожке второй строчки, представляет собой изолированный участок. В третьей строчке фиксируется число 10 (2), соответственно изолированная клетка помещается на второй дорожке и т. д. Кодовая линейка подключена к источнику питания. В зависимости от положения рабочего органа те или иные щетки совмещаются с контактными клетками и включаются в цепь питания. Через контакты реле Рх—Р6 блока управления щетки 2 присоединены к обмотке реле Рк, контакты которого включают цепи питания механизмов автоматического переключения привода. Если реле Рк выключено, то привод рабочего органа отключен. При включении той или иной комбинации реле Рг—Р3 в соответствии с информацией, зафиксированной на перфокарте, цепь питания реле Рк окажется замкнутой через включенные щетки и рабочий орган начнет перемещаться. Перемещение будет продолжаться до тех пор, пока все включенные щетки не попадут на изолированные клетки. Это произойдет в тот момент, когда щетки окажутся на той строке, на которой зафиксировано то же двоичное число, что и в программе. Комбинация отверстий на перфокарте соответствует числу 10110, то же число зафиксировано в двадцать второй строчке линейки. Вначале движения щетки совпадают с краем первой строчки. Перемещение рабочего органа происходит слева направо. В тот момент, когда все щетки совместятся с двадцать второй строчкой, включенные щетки совпадут с изолированными участками, все параллельные цепи питания реле Рк окажутся разомкнутыми и рабочий орган остановится. Кодовая линейка может быть изготовлена из прозрачного материала с черными и прозрачными клетками. В этом случае для замыкания цепей используются фотодатчики, перемещающиеся вдоль линейки вместо щеток. Так как при двоичном коде могут быть ложные срабатывания, то используют модифицированный двоичный код — код Грея. Разрешающая способность рассмотренной схемы низкая, так как ширина строчек не может быть сделана очень малой. Для повышения разрешающей способности применяются двухшкальные датчики с кодовыми барабанами и дисками. Схема двухшкального датчика с двумя кодовыми барабанами аналогична схеме двухразрядного переключателя. Кодовый барабан с высокой разрешающей способностью получает вращение через шестеренчато-реечную передачу 1—2, а кодовый барабан 5 с низкой разрешающей способностью поворачивается по окончании одного оборота барабана на одну строчку через передачу. В развернутом виде кодовые барабаны представляют собой кодовые линейки. Вместо барабанов могут быть использованы кодовые диски. При использовании двухшкальных кодовых датчиков можно получить высокую разрешающую способность. Аналоговая система. Информационное число, зафиксированное на перфокарте, преобразуется с помощью «преобразователя представления» в напряжение, пропорциональное информационному числу, которое подается к блоку сравнения, состоящему из усилителя 6 и поляризованного реле Рк, управляющего приводом. С другой стороны к блоку сравнения подводится напряжение от скользящего контакта, связанного с рабочим органом. При перемещении рабочего органа скользящий контакт скользит по поверхности сопротивления 4, включенного обоими концами в цепь питания. При такой схеме включения, называемой схемой потенциометра, напряжение на скользящем контакте пропорционально пути, пройденному скользящим контактом, а следовательно, и рабойм органом. Поляризованное реле срабатывает в зависимости от знака алгебраической суммы напряжений, поступающих от преобразователя представлений и датчика обратной связи. Если задающее напряжение, установленное преобразователем представления, по абсолютной величине больше напряжения обратной связи, то поляризованное реле включает движение рабочего органа влево, если меньше — вправо. Перемещение продолжается до тех пор, пока задающее напряжение и напряжение обратной связи не станут равны по абсолютной величине, в этот момент поляризованное реле выключается, и движение рабочего органа прекращается. Для того чтобы остановить рабочий орган в тот момент, когда скользящий контакт придет в точку D датчика обратной связи, необходимо с помощью преобразователя установить в точке С напряжение, равное напряжению в точке D потенциометра 4. Для этого в цепь АС надо включить сопротивление, равное сопротивлению участка потенциометра, а в цепь ВС — сопротивление, равное сопротивлению участка потенциометра L—I.
Рис. 17. Блок-схема аналоговой системы цифрового программного управления. В качестве потенциометра обратной связи может быть использован многовитковый потенциометр с коррекционным устройством, кинематически связанный с рабочим органом. Сопротивления магазина могут быть подогнаны с высокой точностью. Все это позволяет достигнуть довольно высокой точности аналоговой системы. По экспериментальным данным точность при позиционном перемещении стола фрезерного станка со скоростью 500 мм/мин находилась в пределах ±0,02 мм. Фазочувствительная система. Величина перемещения задается с помощью сигнала, представляющего собой синусоидально изменяющееся напряжение, фаза которого непрерывно сдвигается. Сдвигу фазы на 360° соответствует перемещение рабочего органа на определенную величину. Общая величина перемещения задается в программе углом сдвига фаз. Такой фазомодулированный сигнал может быть также зафиксирован на магнитной ленте, которая намагничена таким образом, что при протягивании ее перед магнитной головкой возникает сигнал в форме синусоидально изменяющегося напряжения, которое непрерывно смещается по фазе. Задающий фазомодулированный сигнал, считываемый головкой, после усиления в усилителе поступает к фазовому дискриминатору (фазовому детектору). С другой стороны к фазовому детектору подводится аналогичный сигнал от сельсина, являющегося датчиком обратной связи. Трехфазный ток для питания обмотки статора сельсина возбуждается с помощью сигналов, также зафиксированных на магнитной ленте. Сигналы считываются головкой, усиливаются усилителем и поступают к блоку, вырабатывающему трехфазный ток возбуждения для питания обмотки статора сельсина.
Рис. 18. Блок-схема фазочувствительной системы цифрового программного управления. В обмотке ротора сельсина возбуждается переменный ток. Предположим, что в момент начала работы задающий сигнал и сигнал обратной связи совпали по фазе. Вследствие того что фаза задающего сигнала смещается относительно фазы сигнала, определяющего частоту тока питающего обмотку статора сельсина, то между задающим сигналом и сигналом обратной связи появляется сдвиг фаз ДА. Фазовый дискриминатор вырабатывает сигнал, пропорциональный рассогласованию фаз, который используется для управления приводом. Сельсин связан с рабочим органом зубчато-реечной передачей. Сигнал, вырабатываемый фазовым дискриминатором, заставляет перемещаться рабочий орган и поворачиваться сельсин в направлении, обеспечивающим уменьшение величины рассогласования. Движение рабочего органа продолжается до тех пор, пока к фазовому дискриминатору поступает задающий сигнал. Имеется большое число различных форм фазочувствительных систем. Принципы задания и исполнения цикловых и технологических команд в различных системах управления. Методы задания технологических и цикловых команд определяются видом используемого программоносителя. На панелях управления команды задаются с помощью переключателей или штеккеров, на перфокартах — пробивкой соответствующей комбинации отверстий в произвольном коде, на магнитных лентах — записью соответствующей комбинации штрихов. Сигналы, поступающие на основе информации, зафиксированной в программоносителе, расшифровываются блоком управления и используются для управления механизмами переключения привода или независимыми электродвигателями привода. В качестве примера рассмотрим привод с электромагнитными муфтами. Привод получает вращение от электродвигателя. При рабочем ходе движение передается через червячную передачу, при быстром — через коническую передачу. Червячная шестерня связана с винтом, осуществляющим перемещение рабочего органа, через муфту обгона. При включении конической передачи муфта обгонЪ автоматически расцепляет червячную шестерню и ходовой винт, который получает быстрое вращение от конической передачи. Включение, выключение и реверсирование рабочего и быстрого ходов осуществляются электромагнитными муфтами. Муфты служат для включения и реверсирования рабочего хода. Шестерни, связанные с муфтами, сидят свободно на валу червяка, на котором закреплен диск. При включении одна или другая электромагнитная муфта сцепляется с диском 16 и соответствующая шестерня передает вращение валу червяка. Шестерня получает вращение от электродвигателя через шестерню, шестерня — через шестерни. Таким образом, шестерни вращаются в различных направлениях. Включая ту или другую шестерню, можно изменять направление рабочего хода. Шестерни привода быстрых ходов также имеют различное направление вращения. Включая одну из них с помощью электромагнитных муфт или, которые сцепляются с якорем, получают быстрый ход в том или ином направлении. Если набор команд производится на пульте управления, то необходимая для данного этапа цикла команда устанавливается с помощью переключателей и т. д., каждый из которых расположен в соответствующей строчке пульта. Одни концы обмоток электромагнитных муфт ЭМХ — ЭМг присоединены к общему источнику питания, другие — к контактам переключателей. При наборе необходимой команды скользящий контакт переключателя совмещается с контактом соответствующей электромагнитной муфты. Так, например, с помощью переключателя включена электромагнитная муфта ЭМХ, что соответствует быстрому ходу вперед, а с помощью переключателя 20—электромагнитная муфта ЭМ3, что соответствует рабочему ходу вперед.
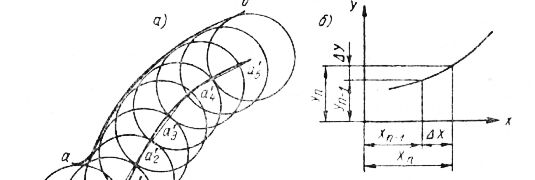
Рис. 19. Блок-схема задания и исполнения цикловых и технологических команд. Скользящие контакты переключателей и т. д. подключены к контактам шагового искателя 21, который поочередно подключает переключатели цикловых команд. Шаговый искатель подключает переключатели технологических команд. При фиксации команд на перфорированной ленте обмотки электромагнитных муфт подключаются к цепи питания с помощью контактов реле РВХ и РВ2. Муфты ЭМ1 и ЭМ3 включаются с помощью нормально закрытых контактов реле РВХ, а муфты ЭМ2 и 3Mt с помощью нормально открытых контактов реле РВХ. Муфты ЭМХ и ЭМ 2 включены в общую цепь, которая подключается к источнику питания нормально закрытыми контактами реле РВ2. Аналогично общая цепь питания муфт ЭМ3 и ЭМ4 подключается к источнику питания нормально открытыми контактами РВ 2. Таким образом, два реле позволяют включить одну из четырех муфт. Например, если реле РВХ и РВ2 выключены, то включена муфта ЭМХ, если реле РВХ выключено, а реле РВ2 включено, то включена муфта ЭМ.2, получающая питание через нормально закрытые контакты РВ2 и нормально открытые контакты реле РВХ, которые при включении реле замкнутся. Очевидно, что код, в котором задаются цикловые и технологические команды, определяется выбранной схемой управления и является произвольным. Применение систем цифрового программного управления при функционально связанных перемещениях. При цифровом программном управлении функционально связанные перемещения двух рабочих органов, необходимые для образования участка профиля аб, осуществляются системой автоматического управления на основе информации, зафиксированной в программе. Следует заметить, что во многих случаях контурно- и пространственно-сложные поверхности обрабатываются фрезой с радиусом г, поэтому в процессе перемещения рабочих органов должна быть воспроизведена траектория движения центра фрезы а’а‘5. В ряде случаев траектория движения центра фрезы может быть задана уравнением, а система цифрового программного управления позволяет воспроизвести эту траекторию на основании заданного уравнения и координат начальных точек кривой.
Рис. 20. Схема образования профиля детали при цифровом программном управлении. Заданная кривая может быть также заменена рядом участков, каждый из которых очерчен кривой определенного вида, например параболой. Для каждого участка заменяющая кривая имеет свои параметры. На границах участков кривые плавно сопрягаются. При данной форме аппроксимации повышается точность обработки, оказывается возможным уменьшить число участков, на которое разбивается заданная кривая, но одновременно усложняется либо система управления, либо подготовка программы. Координаты точек а’, а[, а2…..а’п называются координатами опорных точек профиля. Координаты опорных точек профиля, выраженные информационным числом, вводятся с помощью читающего устройства в вычислительное устройство системы управления станком. Вычислительное устройство (интерполятор) необходимо для определения координат промежуточных точек профиля в интервале между опорными точками. При перемещении одного рабочего органа из точки с координатой в точку с координатой хп второй рабочий орган должен переместиться из точки с координатой уп_г в точку с координатой уп. Величина приращения координаты А у является функцией приращения координаты л: — Ах. Вычислительное устройство определяет величины приращения координат и подает соответствующие сигналы приводам рабочих органов, осуществляющих необходимые перемещения. Схема подготовки и воспроизведения программы. Подготовка программы и обработка контурно- и пространственно-сложных поверхностей по заданной программе складываются из следующих этапов. На основании чертежа профиль обрабатываемой детали разбивается на ряд участков. Разбивка профиля производится с учетом характера траектории движения центра фрезы, которая может быть построена графически.
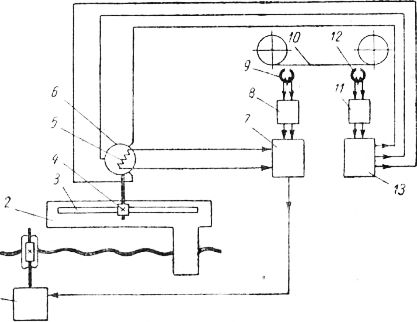
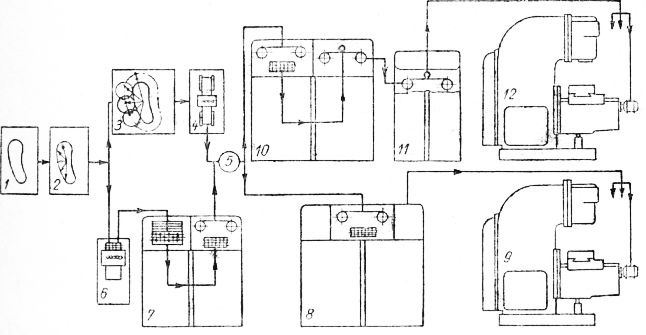
Рис. 21. Схема подготовки и воспроизведения программы при обработке контурно- и пространственно-сложных поверхностей. С помощью имеющихся вычислительных средств определяются координаты опорных точек траектории. Координаты опорных точек, выраженные информационным числом, фиксируются с помощью перфоратора на перфоленте. Одновременно фиксируются цикловые и технологические команды. Так как определение координат опорных точек траектории является трудоемкой операцией, то при наличии соответствующих вычислительных машин последние могут быть использованы для выполнения необходимых вычислительных работ. В этом случае на перфокарте фиксируются координаты точек профиля обрабатываемой детали 6 и радиус фрезы, выраженные информационными числами. Перфокарта вводится в читающее устройство вычислительной машины, которая определяет координаты опорных точек траектории и фиксирует их кодом совместно с цикловыми и технологическими командами на перфоленте. В результате первым или вторым методом получается первичная программа 5, которая используется в дальнейшем либо для непосредственного управления станкам, либо для подготовки вторичной программы на магнитной ленте. Если первичная программа используется непосредственно для управления станком, то она поступает в читающее устройство интерполятора, который подает сигналы управления соответствующим рабочим органам станка. Если первичная программа используется для составления вторичной программы, то она поступает в интерополятор, где на основе первичной программы вырабатывается вторичная программа, фиксируемая на магнитной ленте. Вторичная программа поступает в командо-воспро-изводящее устройство, которое подает сигналы управления рабочим органам станка. Второй метод позволяет использовать дорогостоящий интерполятор для обслуживания группы станков, что приводит к уменьшению первоначальных затрат. Однако при обработке крупных деталей программа на магнитной ленте приобретает столь большой объем, что оказывается целесообразным использовать интерполятор, непосредственно связанный со станком.
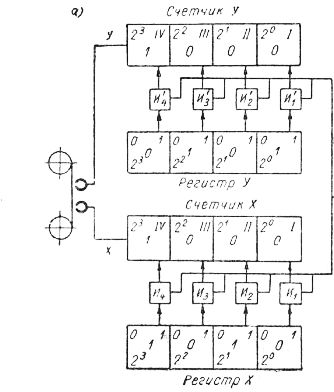
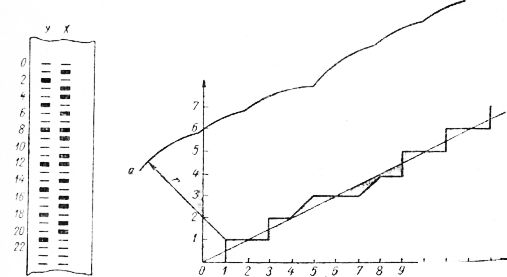
Рис. 22. Блок-схема вычислительного устройства. При аналоговой системе управления интерполятор представляет собой сравнительно несложное устройство, что позволяет иметь в системе управления каждым станком свой интерполятор. Принцип работы вычислительных устройств для опредления координат промежуточных точек профиля. Вычислительные устройства для определения координат промежуточных точек профиля представляют собой в большинстве случаев весьма сложные электронные или полупроводниковые машины. Ознакомление с такого рода машинами выходит за рамки данной работы. Однако представление о принципах работы подобных машин может быть получено при рассмотрении простейшей принципиальной блок-схемы. Это вычислительное устройство позволяет определить координаты промежуточных точек профиля, образованного рядом наклонных линий. Не останавливаясь на теоретических соображениях, заложенных в основу схемы, перейдем непосредственно к ее рассмотрению. Вычислительное устройство состоит из генератора тактовых импульсов ГИ, который непрерывно через определенные промежутки времени подает импульсы, двух двоичных счетчиков X и Y и двух регистров X и Y. От генератора ГИ импульсы направляются к ячейкам двоичных счетчиков X и Y. Все ячейки подключены к генератору тактовых импульсов параллельно. Импульсы поступают к ячейкам через вентили И. Если вентиль открыт, то импульсы проходят к ячейке, если закрыт — не проходят. Вентилями управляют ячейки регистров X и Y. Если ячейка регистра находится в состоянии, то управляемый ею вентиль открыт, если в состоянии 0 — закрыт. В ячейки регистров вводятся информационные числа, определяющие координаты х0 и у0 наклонной прямой. В зависимости от значений координат х0 и г/0 открываются определенные вентили II, и тактовые импульсы поступают к соответствующим ячейкам двоичных счетчиков X и Y. По мере поступления тактовых импульсов ячейки двоичных счетчиков заполняются. При переполнении ячеек двоичный счетчик X и Y, в свою очередь, выдает импульс. Импульсы, поступающие от двоичных счетчиков, либо непосредственно направляются в систему управления станком и вызывают соответствующие перемещения рабочих органов, либо записываются с помощью аппаратуры на магнитной-ленте. Порядок следования импульсов, поступающих от счетчиков X и Y, зависит от значений координат х0 и у0. Информационные числа, определяющие координаты х0 и у0, вводятся в регистры с помощью перфокарт или перфолент. Рассмотрим работу вычислительного устройства на конкретном примере применительно к схеме с четырьмя ячейками в каждом регистре и соответственно в двоичном счетчике. Перед началом работы для сокращения времени первоначального заполнения счетчиков в них вводится двоичное число 1000, называемое машинной единицей. Полная емкость четырехразрядного двоичного счетчика равна 1111, что соответствует десятичному числу 15. Двоичные счетчики подают сигналы- при переполнении, т. е. при переходе четвертой ячейки из состояния 1 в состояние 0. Предположим, что надо воспроизвести наклонную прямую с координатами х0 — 10 и у0 = 5. В двоичной системе х0 = 1010 и у0 = 0101. Соответствующие двоичные числа введены в регистры X и Y. Тогда при подаче импульсов генератором они будут поступать ко второй и четвертой ячейкам счетчика X, так как при вводе в регистр числа 1010 открываются вентили Я2 и #4. Импульсы поступают также к первой и третьей ячейкам счетчика Y, так как при вводе в регистр Y двоичного числа 0101 открываются вентили и Я3. Ко всем ячейкам импульсы поступают одновременно. При подаче первого тактового импульса ко второй и четвертой ячейкам счетчика X поступают сигналы, т. е. в счетчик вводится число 1010; в десятичной системе это число равно 10; так как ранее в счетчик бала введена машинная единица, т. е. число 8, то счетчик оказывается переполненным, вторая ячейка переходит в состояние 1, а четвертая — в состояние 0. От счетчика X поступает один импульс по каналу X. При подаче второго тактового импульса ячейка II счетчика переходит из состояния 1 в состояние 0 и переводит ячейку III в состояние Г, ячейка IV благодаря поступлению тактового импульса переходит из состояния 0 в состояние 1. При поступлении третьего тактового импульса ячейка II переходит в состояние 1, ячейка III остается в состояние 1, а ячейка IV благодаря поступлению тактового импульса из состояния 1 переходит в состояние 0, при этом от счетчика по каналу X поступает очередной импульс, и т. д. Аналогично происходит изменение чисел и в счетчике Y. Расположение магнитных штрихов при записи импульсов, поступающих от счетчиков X и Y, на магнитной ленте представлено на рис. III. 67, а. При воспроизведении программы, зафиксированной на магнитной ленте, каждому штриху соответствует перемещение рабочего органа в направлении соответствующей координаты на величину разрешающей способности системы. В зависимости от расположения магнитных штрихов на дорожках X и Y перемещения в направлении каждой из координат происходят поочередно или одновременно. На рис. III. 67, б показана получающаяся при этом траектория движения центра фрезы. Центр фрезы перемещается по ломаной линии; при этом фреза, имеющая радиус г, обрабатывает профиль аб. Если учесть при этом, что фреза при поступлении одного импульса перемещается на 0,01—0,05 мм, то можно представить себе, что обработанный профиль мало отличается от прямой линии. В действительности схема линейного интерполятора значительно сложнее рассмотренной нами. Еще более сложные схемы имеют нелинейные интерполяторы, обеспечивающие движение центра фрезы по тем или иным кривым: участкам парабол, эллипсов и др., которые используются при аппроксимации траектории движения центра фрезы. На рис. 24 показана вычислительная машина для подготовки на магнитной ленте программы работы станка. Первичная программа готовится с помощью перфоратора с десятичной клавиатурой и включает в себя координаты опорных точек профиля обрабатываемой детали. Если те или иные участки профиля очерчены дугами окружности, то в программу включаются координаты центров окружностей и их радиусы. Кроме того, в программу входят также сведения о диаметре фрезы, с помощью которой производится обработка, и цикловые и технологические команды. На основании этих исходных данных машина составляет вторичную программу на магнитной ленте.
Рис. 23. Программа перемещения и воспроизведении траектории движения центра фрезы и профиля детали.
Рис. 24. Вычислительная машина для подготовки программы. Для обработки контурно- и пространственно-сложных поверхностей могут быть использованы число-импульсные следящие, число-импульс-ные шаговые, аналоговые и фазочувствительные системы. В качестве примера рассмотрим блок-схему число-импульсной шаговой системы для обработки контурно-сложных поверхностей. Рабочие органы имеют приводы с шаговыми электродвигателями. На двух дорожках магнитной ленты записаны импульсы, вызывающие перемещение рабочих органов. Импульсы, записанные на дорожке у, считываются головки и, пройдя через усилитель считывания, поступают к распределителю импульсов. После усиления в усилителе эти импульсы направляются к приводу. Аналогично импульсы, записанные на дорожке, считываются головкой и, пройдя через усилитель считывания, распределитель импульсов и усилитель, поступают к шаговому двигателю привода рабочего органа. Результатом функционально связанных перемещений рабочих органов является перемещение обрабатываемой детали относительно режущего инструмента по заданной траектории. Различные системы цифрового программного управления для осуществления функционально связанных перемещений рабочих органов используются на фрезерных станках для обработки контурно- и пространственно-сложных поверхностей. В частности такими системами управления оборудованы некоторые модели отечественных фрезерных станков. Следует заметить, что появились отдельные модели зубо-обрабатывающих станков, в которых функциональная связь между перемещениями заготовки и режущего инструмента осуществляется с помощью системы цифрового программного управления. Реклама:Читать далее:Управление общим автоматическим циклом работы станкаСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|

|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|