|
|
Категория:
Фрезерные работы Далее: Системы управления станками Под промышленными роботами (автоматическими манипуляторами с ЧПУ) понимают автоматические действующие устройства для автоматизации загрузочно-разгрузочных, транспортных операций, а также для осуществления сложных перемещений исполнительных механизмов. Важным преимуществом роботов является возможность их быстрой переналадки, особенно в условиях частой смены объектов производства, например, в комплексе со станками с ЧПУ. По конструктивно-технологическому признаку промышленные роботы делятся на две группы: подъемно-транспортные (около 80% мирового парка) и производственные (около 20%). К первой группе относятся роботы, используемые на разгрузочно-загрузочных и транспортно-складских операциях. Роботы второй группы участвуют непосредственно в технологическом процессе (например, сварки, окраски, контроля и сборки машин). В механообработке используются, как правило, подъемно-транспортные роботы. С их помощью могут быть автоматизированы следующие операции: установка — снятие заготовки на станке; контроль правильности базирования заготовок на станке; контроль обработанных деталей; смена и установка режущего инструмента на станке; штабелирование деталей или тары; обслуживание автоматизированных складов; транспортирование деталей от станка к станку; внутрицеховое транспортирование; питание транспортеров; управление станками; очистка и обезжиривание; термическая обработка; консервация и упаковка деталей и др. Применение промышленных роботов предъявляет ряд требований к конструкций деталей станков и вспомогательному оборудованию, а также к планировке участка. Так, например, рекомендуется автоматизировать с помощью промышленных роботов загрузку деталей простейших типов, имеющих поверхности для базирования и захвата, масса детали не должна превышать 500 кг. Существующие конструкции универсальных станков, как правило, мало приспособлены к обслуживанию их роботами. Промышленные роботы рекомендуется использовать для обработки деталей на цикловых станках-полуавтоматах, станках полуавтоматах с ЧПУ и автоматической сменой инструмента, на специальных и агрегатных станках. Применение промышленных роботов будет эффективным тогда, когда будет применено вспомогательное оборудование и оснастка (магазины, накопители, специальная тара, захваты и др.). Желательно, чтобы на позицию загрузки заготовка приходила ориентированной соответственно ее положению на станке для выполнения первой операции механической обработки. При планировке участка необходимо прежде всего предусмотреть все мероприятия по технике безопасности (ограждение, сигнализация и др.).
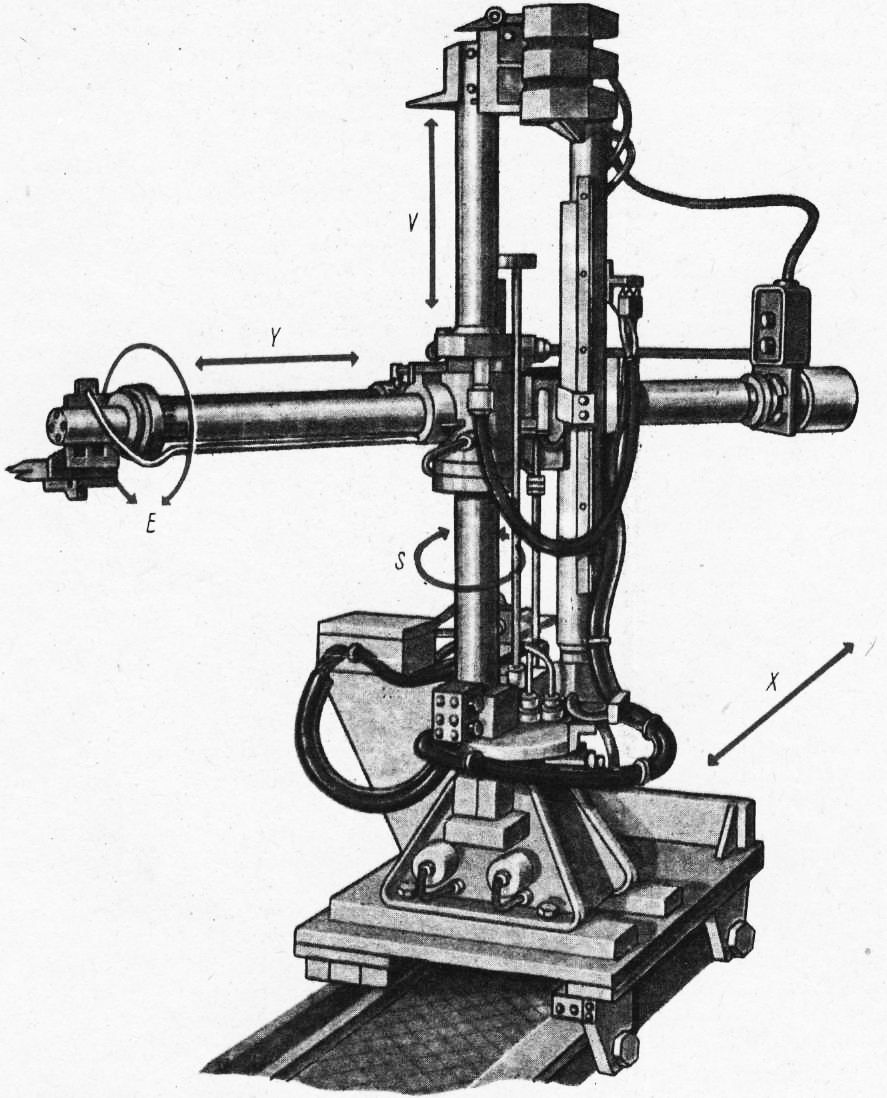
Рис. 1. Общий вид подвижного промышленного робота
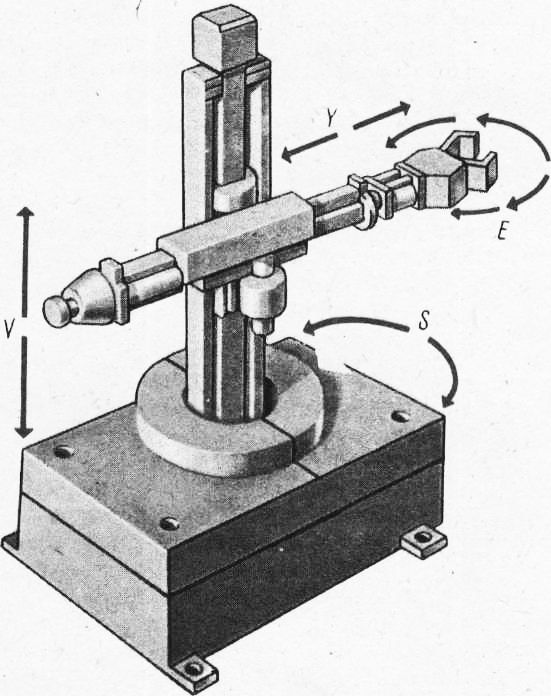
На рис. 1. показан общий вид подвижного промышленного робота, стойка которого перемещается по подвижным напольным направляющим. На стойке горизонтально установлен манипулятор. В зависимости от исполнения цикла работы промышленный робот выполняет следующие движения: перемещение всего устройства по направляющим (координата X), вертикальное перемещение манипулятора (координата V), горизонтальное перемещение манипулятора (координата У), поворот манипулятора в горизонтальной плоскости (координата S), поворот захвата относительно «руки» (координата Е), зажим-разжим захвата. Общее количество степеней подвижности — семь. Последовательность и величина перемещений задаются штекерной панелью и системой переключателей (цикловая система программного управления); управление может быть позиционным или контурным. Величина горизонтального перемещения «руки» — до 100 мм, вертикального — до 750 мм при скорости до 900 мм/с, точность, позиционирования ± 0,5 мм. Максимальный поворот манипулятора — 240° при скорости 90 град/мин. Скорость горизонтального перемещения — 450 мм/с, Грузоподъемность до 60 кг при длине «руки» 1100 мм, в специальном исполнении — до 48 кг при длине «руки» 1400 мм. На рис. 2 показан неподвижный промышленный робот, стойка которого закреплена у обслуживаемого оборудования (зона его действия заштрихована). На стойке установлен горизонтально манипулятор. Промышленный робот может выполнять следующие движения: вертикальное перемещение манипулятора (координата V), горизонтальное перемещение манипулятора (координата У), поворот манипулятора в горизонтальной плоскости (координата S), поворот захвата относительно «руки» (координата Е), зажим-разжим захвата. Система управления — позиционная. Величина горизонтального перемещения «руки» — 500 мм при скорости 400 мм/с, величина вертикального перемещения «руки» — 500 мм при скорости 2500 мм/с. Угол поворота «руки» — 90, 180°. Точность позиционирования + 2 мм. В машиностроении в настоящее время создано свыше 20 автоматических манипуляторов с программным управлением, предназначенных для обслуживания металлорежущих станков, кузнечно-прессового оборудования и литейных машин. Создано более 500 автооператоров для обслуживания линий гальванопокрытий. На выставке «Достижения отечественного станкостроения» («Станки 77») демонстрировалось 11 образцов промышленных роботов. Большинство моделей демонстрировалось в комплексе с технологическим оборудованием. Дмитровский завод фрезерных станков показал комплекс из горизонтально-фрезерного и вертикально-фрезерного станков, обслуживаемых ПР модели «Универсал-15». Оборудование комплекса расположено по дуге окружности, в центре которой находится ПР. Это сложная машина, имеющая шесть степеней свободы (без учета движения зажима). Грузоподъемность 15 кг, тип привода электрический, система управления — аналоговая позиционная. Наиболее полно были представлены ПР. предназначенные для загрузки станков-полуавтоматов деталями типа тел вращения. Самым интересным экспонатом в этой группе являлся робот модели ЦРВ-50 конструкции ЭНИМС, который демонстрировался в составе переналаживаемого автоматического участка, состоящего из двух многоинструментных токарных станков с ЧПУ модели 1Б732ФЗ Московского станкозавода им. С. Орджоникидзе. Участок предназначен для токарной обработки валов в мелкосерийном и серийном производстве. Робот выполняет все транспортно-загру-
Рис. 2. Общий вид неподвижного промышленного робота
зочные операции, включая передачу заготовок между станками и магазинами и кантование заготовок перед их установкой на второй станок. Шарнирная рука робота закреплена на каретке, перемещающейся по монорельсу. Сочетание движений двух звеньев руки с движением каретки позволяет обслуживать обширную рабочую зону площадью свыше 30 м2. В пределах этой площади размещены загрузочные позиции станков и вспомогательного оборудования. Грузоподъемность робота 40 кг. Привод осуществляется от серийных шаговых электродвигателей с гидроусилителями. Робот оснащен набором широкодиапазонных самоцентрирующих быстросменных захватов для валов и фланцев. Устройство ЧПУ модели УМП-331 обеспечивает возможность работы по нескольким (до четырех) независимым программам. Программирование осуществляется посредством обучения. Программоноситель — магнитная лента. Монорельсовое исполнение уменьшает занимаемую площадь и улучшает условия обслуживания оборудования. В последнее время за рубежом для управления промышленными роботами, манипуляторами и загрузчиками применяются специальные пульты управления, которые значительно проще и дешевле устройств ЧПУ для станков. Программирование роботов производится двумя способами: набором программы на клавишном пульте и обучением с использованием пульта ручного управления и памяти для записи программы. Реклама:Читать далее:Системы управления станкамиСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|