|
|
Категория:
Ковка на молотах и прессах Ковочным манипулятором называют напольную машину, предназначенную для захвата, вращения, подачи вперед и назад, перемещения в вертикальной и горизонтальной плоскостях слитков и заготовок при ковке на гидравлических прессах. Напольные манипуляторы подразделяются на безрельсовые и рельсовые. Безрельсовые манипуляторы на колесах автомобильного типа строят грузоподъемностью от 5 до 100 кН (0,5—10 тс). По сравнению с рельсовыми они обладают большей маневренностью, не загромождают рабочее место и удобны в серийном производстве поковок типа валов, осей и др. Их используют для изготовления поковок на молотах и прессах.
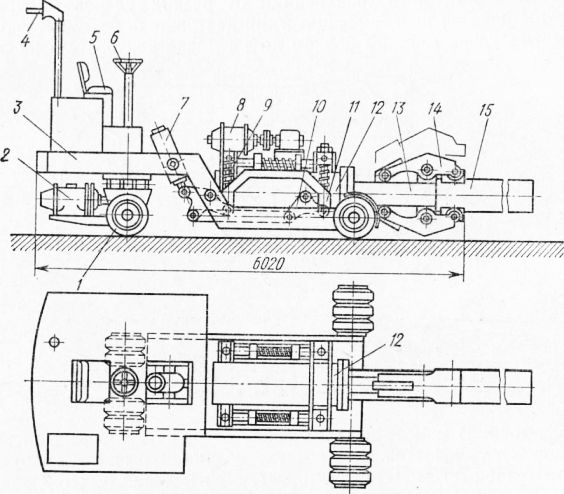
Рис. 1. Напольный безрельсовый ковочный манипулятор грузоподъемностью 25 кН (2,5 тс): Напольный безрельсовый манипулятор грузоподъемностью 25 кН (2,5 тс) передвигается при помощи электродвигателя. Крутящий момент через червячный редуктор и дифференциал передается к двум задним колесам с резиновыми шинами. Тележка 3 с укрепленным на ней механизмом передвижения шарнирно соединена с подъемной рамой. Направление движения регулируется поворотом колес тележки, осуществляемым гидравлическим усилителем, который передает движение на зубчатое колесо поворотной цапфы. В опорах, смонтированных на подъемной раме, расположен хобот с клещевым захватом. Клещевой захват работает от гидравлического цилиндра. Хобот вокруг оси вращается электродвигателем 8 через редуктор. Для предохранения от перегрузок в механизме вращения установлена фрикционная муфта. Рама с хоботом и цилиндром может подниматься и опускаться гидравлическим цилиндром, который расположен на тележке, через систему рычагов. Последние образуют параллелограмм, благодаря которому обеспечивается плоскопараллельное в вертикальной плоскости перемещение хобота. Рама связана пружинной подвеской с основанием тележки. Все гидравлические цилиндры приводятся в действие от масляного насоса. Ток подводится к манипулятору по гибкому кабелю.
Рис. 2. Рельсовый манипулятор грузоподъемностью 30 тс конструкции Электростальского завода тяжелого машиностроения (ЭЗТМ) Рельсовые манипуляторы строят грузоподъемностью до 0,8 МН (80 тс, Уралмаш) и до 12 МН (120 тс фирмы «Демаг» и «Шлеман» ФРГ). Такие манипуляторы небольшой грузоподъемности используют для ковки на молотах и прессах, а большей грузоподъемности — только для ковки слитков HVnpeccax. Рельсовый манипулятор грузоподъемностью 0,3 МН (30 тс) показан на рис. 2. К современным манипуляторам для ковочных комплексов предъявляются высокие требования. Все движения манипулятором должны выполняться синхронно с гидравлическим прессом. , Манипулятор Должен обеспечивать прерывистые перемещения с точной остановкой и непрерывные движения с принудительными задержками. В СССР созданы манипуляторы, работающие автоматически со-тно с прессом по заданной программе. Например, созданный ЭНИКМАШем манипулятор для автоматической ковки поковок массой до 2,5 т работает с гидравлическим ковочным прессом усилием 5 МН (500 тс) и имеет объединенную систему числового программного управления. Хобот такого манипулятора может перемещаться в осевом и боковом направлениях на 300 мм, а в вертикальном—на 500 мм. Частота вращения хобота составляет от 3 до 25 об/мин. Точность отработки составляет: осевые перемещения ± 5 мм, угол поворота ±1>5°. Реклама:Читать далее:Инструментальные манипуляторы, устройства и приспособленияСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|