|
|
Категория:
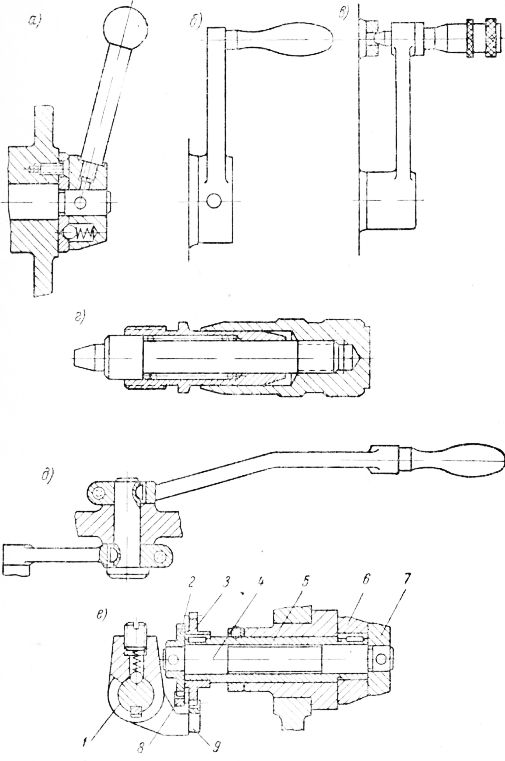
Металлорежущие станки При включении, выключении и реверсировании приводов с помощью органов управления производятся необходимые переключения в кинематических, гидравлических и пневматических цепях. Механизмы переключения могут приводиться в движение непосредственно с помощью рукояток управления либо с помощью вспомогательных приводов, которые включаются с помощью рукояток управления. В первом случае имеет место непосредственное, а во втором — дистанционное ручное управление. Органы непосредственного ручного управления. Непосредственное ручное управление осуществляется различного рода рукоятками, с помощью которых производится перемещение подвижных элементов механизмов переключения кинематических цепей или золотников и поворотных Кранов гидравлических и пневматических приводов. Формы рукояток, применяемых в станкостроении, весьма многообразны и на них имеются соответствующие нормали. В качестве примера на рис. 1 приведены некоторые наиболее часто встречающиеся формы рукояток. Весьма удобна для пользования шариковая рукоятка с фиксирующим шариком, свободно заскакивающим в гнездо фиксирующего диска. Рукоятка, представленная на рис. 1, б, отличается от предыдущей только формой самой ручки. В тех случаях, когда требуется особо надежная фиксация, применяются рукоятки с вытяжным фиксатором. На управление такими рукоятками требуются большие затраты времени. Встречаются также рукоятки, выполненные в форме длинных рычагов. С целью удобства размещения в ряде случаев прибегают к совмещению осей рукояток. Одна из рукояток закрепляется на полой втулке, на конце которой сидит шестерня, сцепляющая с рейкой подвижного ползунка, осуществляющего перемещение соответствующих подвижных элементов кинематической цепи. Вторая рукоятка сидит на оси, на конце которой закреплейа шестерня, зацепляющаяся с рейкой другого ползунка. Фиксация осуществляется шариковыми фиксаторами, расположенными в ползунках.
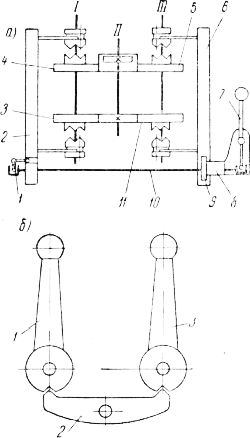
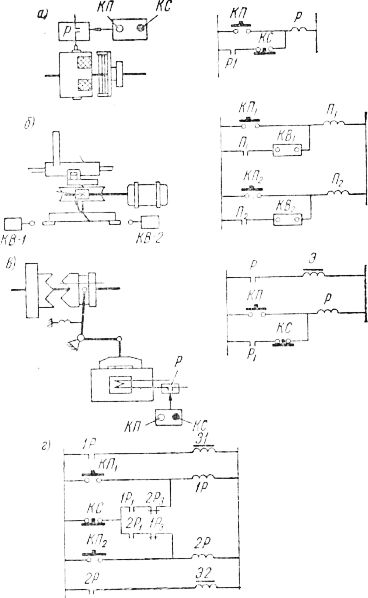
Рис. 1. Рукоятки управления. Как указывалось выше, с целью сокращения затрат времени на управление применяются многофункциональные рукоятки. В качестве примера рассмотрим схему управления приводом, осуществляющим перемещение рабочего органа в двух взаимно перпендикулярных направлениях. Вращение передается от вала II валам I и III, один из которых передает движение механизмам продольного, а другой — поперечного перемещения. При одном направлении перемещения движение передается через шестерни, при другом — через шестерни, которые связаны с валом II через паразитную шестерню. Включение того или иного движения, в том или ином направлении, производится с помощью четырех кулачковых муфт, переключаемых одной рукояткой. Рукоятка смонтирована на оси в пазу ступицы, связанной с шестерней, сцепляющейся с рейкой ползунка. Поворачивая шестерню с помощью рукоятки включают в том или ином направлении движение поперечной подачи. Через полую ступицу проходит штанга, в паз которой заходит конец рукоятки. При повороте рукоятки вокруг ее оси штанга перемещается в осевом направлении и через двуплечий рычаг перемещает ползунок, осуществляющий включение продольного движения в том или ином направлении. Следует заметить, что направление переключения рукоятки совпадает с направлением перемещения рабочего органа, что облегчает запоминание приемов управления и приводит к сокращению затрат времени на управление. Для предотвращения одновременного включения таких механизмов, одновременная работа которых могла бы привести к аварии, применяются различные блокировочные устройства. Принципиальная схема блокировочного устройства приведена на рис. 2, б. Блокировка осуществляется качающейся собачкой. При повороте рукоятки левый конец собачки опускается, а правый заходит в вырез шайбы, сидящей на одной оси с рукояткой, и запирает ее. При повороте рукоятки имеет место обратная картина. Схемы дистанционного управления. Дистанционное управление может быть осуществлено: Пуск, останов и реверсирование электродвигателей осуществляется с помощью кнопок или переключателей и соответствующей пускорегули-рующей аппаратуры, изучаемой в курсе электропривода станков. Включение и выключение электромагнитных муфт также производятся с помощью кнопок или переключателей и соответствующей аппаратуры управления. Цепь питания муфты замыкается с помощью контактов реле Р. Включение муфты осуществляется нажимом кнопки КП, которая замыкает цепь питания обмотки реле. Реле срабатывает, и контакты реле Рх замыкают цепь питания реле через нормально закрытые контакты кнопки КС. Выключение муфты производится кнопкой КС. При нажиме кнопки КС цепь питания реле разрывается и при этом размыкаются контакты Р и Рг. При наличии вспомогательных приводов механизмов переключения схема управления зависит от вида и конструкции привода. Если вспомогательный привод получает движение от электродвигателя, то механизм переключения срабатывает при включении электродвигателя. Применительно к рассмотренной выше схеме механизма переключения с вспомогательным электродвигателем принципиальная схема управления имеет вид, представленный на рис. 3, б. Перемещение подвижного элемента механизма переключения в одном или в другом направлении осуществляется с помощью реверсивного электродвигателя, включаемого реверсивным пускателем. При нажиме на кнопку КП х замыкается цепь катушки П1 пускателя, которая блокируется блок-контактами Ях пускателя. Когда подвижной элемент механизма переключения достигнет заданного положения, сработает конечный выключатель КВг и разорвет цепь питания катушки П ъ электродвигатель остановится. Перемещение подвижного элемента в обратном направлении осуществляется при нажиме на кнопку КП,.
Рис. 2. Многофункциональные рукоятки и блокировка. Подобная схема может быть также осуществлена применительно к большему числу положений подвижного элемента механизма переключения. При использовании в качестве привода механизма переключения тягового электромагнита схема управления имеет вид, представленный на рис. 3, е. Цепь питания электромагнита замыкается контактами реле Р. Включение тягового электромагнита осуществляется кнопкой КП, замыкающей цепь питания обмотки реле Р, выключение — кнопкой КС. При данной схеме может быть получено только два положения подвижного элемента. При использовании двух тяговых электромагнитов, как это имело место в реверсивных золотниках может быть получено три положения подвижного элемента механизма переключения. Один из вариантов схемы управления, которая может быть использована в этом случае, представлен на рис. 3, г. Включение электромагнита Э1 осуществляется контактами реле 1Р, включение электромагнита Э2 — контактами реле 2Р. Включение реле IP и 2Р производится кнопками КП1 и КП2. Цепи самопитания обоих реле размыкаются общей кнопкой КС, т. е. при нажиме на кнопку КС оба электромагнита выключаются и подвижной элемент механизма переключения занимает нейтральное положение. В цепь самопитания реле 1Р введены нормально закрытые контакты 2Р3, а в цепь самопитания реле 2Р — нормально закрытые контакты 1Р3. Предположим, что включен электромагнит Э1 и соответственно реле IP находится на самопитании. При включении с помощью кнопки КП 2 электромагнита Э2 сработает реле 2Р и его контакты 2Р3 разомкнут цепь самопитания реле IP и электромагнит Э1 выключиться. Такая схема позволяет производить переключение без остановки в нейтральном положении. При другом варианте схемы включение каждого из электромагнитов возможно только из нейтрального положения.
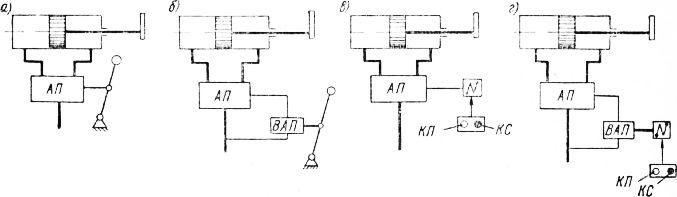
Рис. 3. Схемы дистанционного управления. При использовании во вспомогательных приводах механизмов переключения поршневых гидравлических или пневматических двигателей возможны различные схемы управления. При простейшей схеме поток масла или сжатого воздуха, направляющийся к поршневому двигателю, переключается с помощью соответствующей аппаратуры — золотников или поворотных кранов, управляемых вручную. Для переключения потока масла или сжатого воздуха, направляемого к поршневому двигателю, могут быть использованы золотники с гидравлическим или пневматическим переключением описанной выше конструкции. В этом случае (рис. 4, б), кроме основной аппаратуры переключения (АП), в схеме используется вспомогательная аппаратура переключения (ВАП), управляемая вручную. Вспомогательная аппаратура переключения служит для изменения направления потока масла или сжатого воздуха, подводимого к основной аппаратуре переключения.
Рис. 4. Блок-схемы управления при поршневых вспомогательных приводах. При схемах, представленных на рис. 4, а и б, аппаратура переключения может быть размещена на том или ином расстоянии от поршневых двигателей вспомогательных приводов механизмов переключения. Однако при этом возникает необходимость в прокладке сложной системы трубопроводов, а при подвижных рабочих органах — гибких шлангов, что приводит к усложнению конструкции. Более гибкая схема дистанционного управления может быть получена при использовании аппаратуры переключения с тяговыми электромагнитами описанной выше конструкции. Управление тяговыми электромагнитами осуществляется с помощью кнопок КП и КС или переключателей, при этом используются схемы управления, аналогичные описанным выше. Дистанционное управление используется в ряде случаев и на станках средних размеров, однако оно становится совершенно необходимым на тяжелых станках, где органы управления могут быть сконцентрированы в одном месте только при использовании методов дистанционного управления. При дистанционном управлении упрощается также дублирование органов управления. Если основной управляемый привод является пневматическим или гидравлическим, то используются схемы управления, аналогичные представленным на рис. 4. Реклама:Читать далее:Механизмы управления переключением скоростей и подачСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|