|
|
Категория:
Машиноведение Далее: Ременная передача Механизмом называется замкнутая кинематическая цепь, совершающая заданные, вполне определенные движения под действием приложенных сил и имеющая неподвижное звено (стойку). Одно из звеньев механизма обязательно должно быть неподвижным (стойка). Поэтому шарнирпо-роликовая цепь велосипеда, хотя и представляет замкнутую кинематическую цепь, не является механизмом, так как у нее отсутствует стойка и, следовательно, все звенья подвижны. Звенья механизма, которые задают и передают движение к другим звеньям, называются ведущими, или начальными. Все остальные звенья механизма, движения которых определяются движением ведущих звеньев, называются ведомыми. Например, у велосипеда ведущие звенья — зубчатая звездочка с шатунами, ведомые — заднее и переднее колеса.
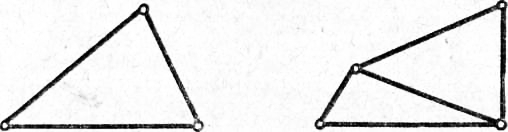
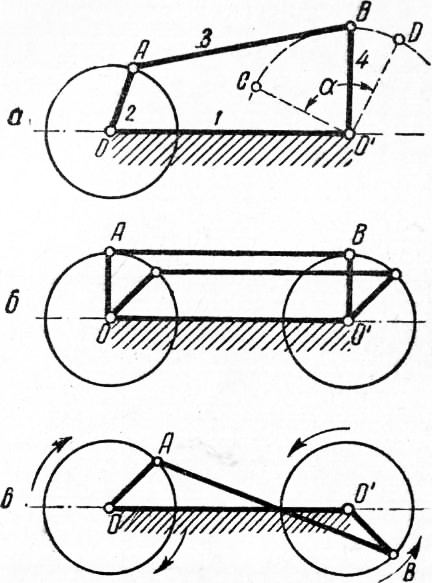
Рис. 1. Шарнирный трехзвенник. В производстве и в быту применяется огромное количество разнообразных механизмов. По своему назначению они разделяются на механизмы, передающие и преобразующие различные виды движения. Любой механизм должен быть простым по устройству, прочным, износоустойчивым, дешевым при изготовлении, удобным по обслуживанию и ремонту. Поэтому при изготовлении механизмов стараются уменьшить количество кинематических пар, заменить, где возможно, поступательные пары вращательными (чтобы уменьшить трение), а также выбрать прочные и легкие материалы для их изготовления. Во время работы механизмов их звенья совершают разнообразные, иногда очень сложные движения. Например, в швейной машине точки вращающегося маховичка совершают круговое движение, т. е. движутся по окружности, шток вместе с иглой совершает возвратно-поступательное движение, т. е. движется по прямой, челнок — качается, т. е. совершает колебательное движение. Машина будет правильно шить, давая ровный и прочный шов, лишь тогда, когда все ее звенья будут двигаться строго согласованно, описывая определенные пути с определенными скоростями. Чтобы иметь представление о том, как определяют форму пути и скорости движения точек механизма, рассмотрим простейший пример — механизм четырехзвенника. Отметим, что если мы возьмем вместо четырехзвениика шарнирный трехзвенник, то никакого движения не будет и вместо подвижной кинематической цепи получится жесткая ферма. Такие жесткие фермы широко применяют в металлических конструкциях, железнодорожных мостах, подъемных кранах, радиомачтах, опорах для проводов высокого напряжения. Четырехзвенник — это шарнирный механизм, широко применяемый в разнообразных машинах. Примером четырехзвениика являются механизмы ножного привода швейной машины или точильного станка. Неподвижным звеном является стойка. Звено, которое вращается вокруг шарнира О, называется кривошипом. Звено, которое только качается около шарнира, называется балансиром, или коромыслом. Звено, соединенное шар-нирно с кривошипом и балансиром, совершает качательное движение и называется шатуном. Ведущим звеном является балансир. В других механизмах ведущим звеном может быть кривошип (насосы, строгальные станки) или шатун вместе с поршнем (двигатель внутреннего сгорания). Такой четырехзвенник называют кри-вошипно-балансирным механизмом. Рассмотрим, как определяется форма пути и скорость движения точек в четырехзвеннике. Отметим две точки А, В на шатуне и посмотрим, какие траектории они опишут при вращательном движении кривошипа. Очевидно, траекторией точки А является окружность радиуса OA, равного длине кривошипа. Точка В будет описывать дугу, окружности радиуса О’В, равного длине балансира. Длина этой дуги определяется двумя крайними положениями точки В: правое, когда кривошип и шатун вытягиваются в одну прямую линию, и левое, когда балансир останавливается и начинает двигаться обратно (рис. 74а). Оба этих крайних положения точки В балансира называются мертвыми. Траектории точек Л и В кривошипа и балансира одновременно являются и траекториями концов шатуна. Если кривошип и балансир четырехзвениика взять одинаковой длины, а шатун будет равен и параллелен неподвижному звену, то получится механизм параллельных кривошипов. У этого механизма все точки шатуна описывают совершенно одинаковые траектории (окружности). Такой механизм применяется у паровозов. Он называется параллелограммом.
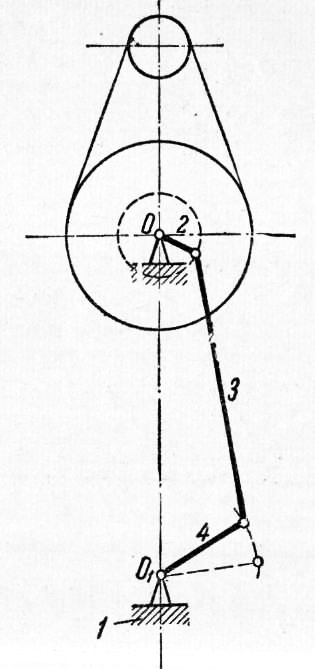
Рис. 2. Схема механизма ножного привода точильного станка: Когда кривошип и шатун (называемый спарником) вытягиваются в одну прямую линию, возникают мертвые положения, при которых движение могло бы потерять свою определенность и паровоз мог бы остановиться или пойти в обратную сторону. Во избежание этого, делают второй такой же механизм (с противоположной стороны паровоза), так чтобы его кривошипы образовывали прямой угол с кривошипами первого. Тем самым оба механизма выводят друг друга из мертвых положений, и опасность неопределенности движения устраняется. Если в этом механизме с равными кривошипами шатун будет непараллелен неподвижному звену, оба кривошипа начнут вращаться в противоположные стороны, причем один из них неравномерно. Такой механизм называется антипараллелограммом.
Рис. 3. Шарнирный четырехзвенник: Реклама:Читать далее:Ременная передачаСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|