|
|
Категория:
Композиция в технике Как свидетельствуют международные выставки станочного оборудования последних лет, устойчиво развиваются тенденции создания «безлюдной технологии», находя отражение в оборудовании, выпускаемом многими известными фирмами разных стран. При этом непрерывно расширяется сфера применения роботизированных комплексов с ЧПУ. Едва ли не все виды обработки металлов, погрузочно-разгрузочные работы, системы контроля изделий, а также активное проникновение роботов в быт с целью повышения его комфорта, в больничную среду, особенно для обслуживания инвалидов и престарелых,— эти и многие другие области производства, сельского хозяйства и пр. все шире пользуются роботами и целыми их комплексами. Уже не утопией, а реальностью сегодняшней жизни становятся роботы интеллектуали-зированного типа, снабженные видеодатчиками, решающие проблемы распознавания зрительных образов трехмерных объектов (например, разбор и складирование различных элементов со сложными формами). Особое внимание исследователи и конструкторы уделяют совершенствованию механической руки с целью все большего усложнения задач, выполняемых роботом, вплоть до тончайших манипуляций. Пока выделено семь основных функций механической руки, в том числе детектирующий контроль состояния, фиксирующая функция, мягкое касание, контроль усилия фиксации и др. Создание универсальной руки, обладающей всеми функциями, позволит достичь еще более высокого уровня автоматизации производства. Особыми преимуществами отличаются роботы, имеющие бесшарнирную конструкцию руки, что обеспечивает высокие линейные скорости при входе и выходе ее из рабочих зон оборудования. Понятно, что исследованиям и разработкам роботизированных систем во многих странах придается исключительное значение, и эта область техники прогрессирует особенно бурно. По данным на J981 г., самой роботизированной страной в мире была Швеция, где на 1 тыс. человек, занятых в металлообрабатывающей промышленности, приходилось 3,08 робота, в то время как в США —0,4, а в Японии 1,9*. Однако нас проблема роботизации техники интересует в предмете данной книги, т. е. в аспекте изменения технических форм. И здесь мы встречаемся со своими специфическими сложностями: во-первых, в форме роботов еще нет устоявшихся, традиционных элементов, поскольку эта область, в сущности, только начинает свое развитие, насчитывая всего два с небольшим десятилетия, а во-вторых, применение роботов настолько разнообразно, что трудно и говорить о какой-то универсальной форме, какой стала для нас, например, форма каждого вида металлообрабатывающих станков, обычно безошибочно узнаваемых по внешнему виду. С другой стороны, стремительное развитие этой области техники требует оперативных поисков с целью оптимизации художе-ственно-конструкторских разработок. Тем более что принципы действия робо-тотехнических систем во многом ломают наши представления о традиционных формах машин. Ведь робот—самая «живая» из всех до сего времени существовавших машин**. Что же касается автоматизированных на базе ЭВМ комплексов роботов, то в плане осмысления их художественного образа эта задача не только необычна для дизайна, но и носит своего рода философский характер. Как должен выглядеть этот «живой» механизм? Какие образные черты следует развивать в ходе дальнейших разработок, чего следует избегать, а может быть, и опасаться? Над этими вопросами думают сегодня дизайнеры многих фирм, и, судя по разнообразию решений, поиск ведется по многим направлениям. Разумеется, ответы на сложные проблемы формообразования роботов выходят далеко за рамки привычных задач техники. Более того, принципиально новы сами эти проблемы. Ведь до сих пор ни один вид машин не уподоблялся в своих действиях человеку в такой степени, как робот. Казалось бы, наиболее естественный путь в разработке форм и образов — все большее уподобление роботов живым организмам. Было немало именно таких попыток, особенно при использовании шарнирных подсистем с большими степенями свободы и спецификой их движений. Соответственно разрабатывались не только формы элементов сочленения, но и цветовая гамма. Насколько в принципе правомерен такой подход? На наш взгляд, его вряд ли следует принимать в качестве конструкторской и тем более дизайнерской программ. Хотя известно, что японская «Хитачи», некоторые шведские и другие фирмы, первенствующие в разработках робототехники, иногда подчеркнуто уподобляют роботов человеку, перенося это в известной мере и на форму. Однако это относится далеко не ко всем видам роботов, а главное — параллельно развивается другая линия в решении образа машины, которая противостоит такому своеобразному «натурализму» в технике. На наш взгляд — это правильнее: не рекламные трюки должны определять конструкторский подход к «живым« машинам, а прежде всего подлинная рациональность решения таких систем и их отдельных узлов. Разумеется, человеческая рука представляется ближайшим аналогом для решения формы хвата многих роботов, что и влечет за собой соответствующие образные аналогии. Однако уровень техники так высок, что вскоре, видимо, позволит манипулятору превзойти и точность, и разнообразие движений человеческой руки. Следовательно, нет сколько-нибудь глубоких оснований специально усиливать сходство машины с человеком и тем самым драматизировать ее форму и действие. По-видимому, и здесь следует руководствоваться диалектико-материалистическим пониманием связи формы и содержания. Ведь как бы ни были близки действия человека и машины, человеком она все равно никогда не станет — вот в чем суть. А всякое утрирование действия ведет лишь к созданию карикатурного образа—уже не машины, а самого человека. Вопрос этот актуален и важен для многих видов техники и, вероятно, потребует еще серьезных теоретических разработок и лабораторных исследований. Анализируя форму различных промышленных роботов (ПР), производимых фирмами разных стран, в конце концов замечаешь, что прогрессивные принципы действия и здесь, как всегда бывало в технике, сегодня оставляют далеко позади композиционные приемы в разработке этих механизмов. Какие же погрешности формы более всего бросаются в глаза? Прежде всего, открытая действующая часть рабочего механизма зачастую композиционно слабо связана с основанием. Конечно, функционирует ПР технически нормально, но образ его в результате отсутствия органичных связей рабочей «руки» с основанием многое теряет в своей убедительности. Это свойственно и ряду американских моделей, и моделям шведских фирм, и некоторым отечественным, к сожалению, тоже. В этих случаях сложная, динамичная, изменяющаяся в процессе работы техническая структура выступает откровенной надстройкой к основанию подчеркнуто ящичного типа. Особенно заметно это в тех случаях, когда хват и несущая его рычажная система описывают в пространстве сложные траектории, а основание своей статичностью словно останавливает, сдерживает многообразные движения манипуляторов. Быстро возникший, этот прием предельного упрощения основания композиционно неубедителен еще и потому, что для некоторых систем роботов нет необходимости в крупном развитом нижнем объеме. Сложная, динамично изменяющаяся конструкция рабочей части должна и композиционно найти отклик в форме основания. Конечно, если речь идет о роботе, установленном на высокой колонне, где хват разворачивается на 360° вокруг ее оси, композиционная система как будто напрашивается сама собой, ибо здесь мы имеем дело с центрической схемой в противоположность, например, определенной секторной работе руки робота. Однако и сама колонна робота не должна уподобляться некоему фонарному столбу. Между тем, примитивные, подчас даже старомодные в своих формах колонны различных ПР-погрузчиков снижают эстетическое качество этих технически совершенных механизмов. Таким образом, практически для любых систем роботов композиционное решение основания и его связь с несомым механизмом приобретает важное значение с точки зрения эстетических параметров этих машин. Анализ показывает также, что в тех случаях, когда основание ПР само имеет развитую конструктивную форму — прямолинейные или кольцеобразные направляющие для передвижения механической руки, операторские кабины, многие вспомогательные агрегаты, электрооборудование и т. п.— оно зачастую оказывается излишне «забитым», загруженным материалом. Такая компоновка визуально слишком уплотняет основание, в то время как, будучи более ажурным, легким, оно позволило бы достигнуть целостности формы, единства принципа структуры механизма. Лучшими, на наш взгляд, являются системы ПР, составляющие единую общую структуру рабочего механизма и основания. В тех случаях, когда основанием рабочей части ПР все же служит локальный объем, что определяется принципом компоновки машины, важно найти композиционные переходы, пространственные «мостики» между рабочей частью и блоком основания, чтобы не возникало примитивных отношений этих объемов. Робот—слишком совершенная на новом этапе развития машиностроения система, чтобы с его формой ассоциировалась эстетическая примитивность. Еще один ответственный эстетический параметр ПР — отношение между пластической разработкой и отделкой наиболее важных рабочих частей механизма (хвата, насадок и пр.), с одной стороны, и вспомогательной частью конструкции, а также всем шарнирным механизмом — с другой. Если основная в функциональном отношении часть обычно тщательно выполнена, пластически проработана, отделана и окрашена или отполирована, то менее значимые, даже непосредственно примыкающие к рабочей зоне части механизма нередко выполняются на совершенно ином уровне. Наплывы незачи-щенной сварки местами визуально деформируют технически сложное изделие. В технологической разработке робототехники, как и в разработках технических условий на эти изделия и принципов их проектирования, очевидно, следует исходить из самого класса этих машин. Если с несовершенством технологии еще кое-как можно мириться в другом оборудовании, то роботу, точному манипулятору, неряшливость технологии противопоказана, как говорится, «по определению». В разделах этой книги мы не раз обращали внимание читателя на необходимость композиционной координации важнейших формообразующих линий механизма. Для механической руки эта координация имеет особое значение, так как если не проверять и своевременно не корректировать в процессе композиционного поиска отношения всех частей механизма между собой в разных положениях манипулятора, то могут возникать некрасивые, дисгармоничные сочетания в определенных положениях элементов изменяемой системы. Вообще одним из важных принципов художественного конструирования пространственно изменяющейся системы (а ПР — одна из самых ответственных) должны быть визуально одинаково приемлемые для нас отношения всех элементов и пустот между ними в любых рабочих положениях. Как показывает анализ, во многих случаях ПР сегодня еще представляет собою более грузную, чем требует конструкция, пространственную систему. Поэтому тенденция к облегчению основы конструкции, а главное —к миниатюризации ПР имеет определенную основу: конструкторы задаются целью максимально оптимизировать отношения между конкретным усилием, развиваемым роботом, его собственной массой, габаритами системы и объемом, который ПР занимает в помещении. Более того в условиях все более острой экономии производственных площадей актуальной становится миниатюризация всей эксплуатационной системы обеспечения робота (электроники, гидравлики и т. п.).
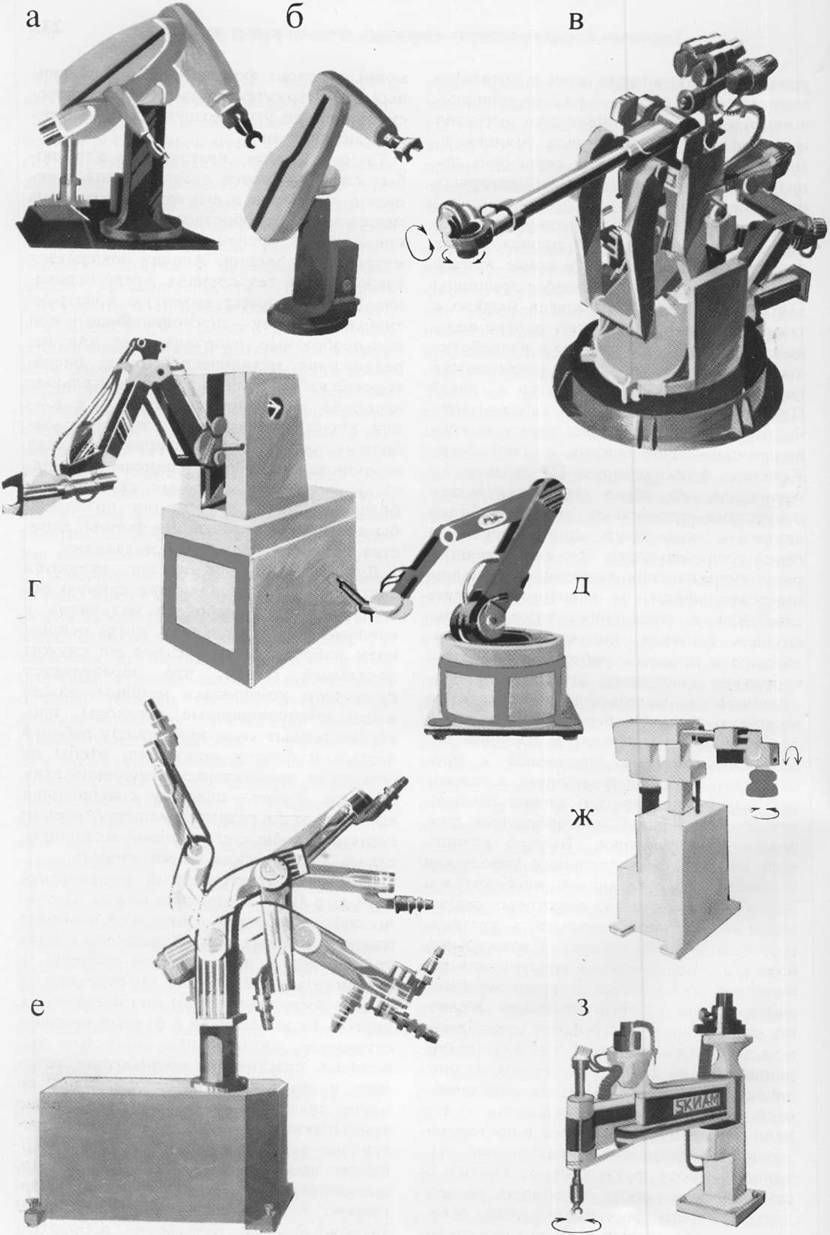
На рис. 106 показано несколько роботов разных фирм, весьма различных и по формам, и по цветовому решению. Небольшие ПР (рис. 106, а, б) напоминают изделия бытовой техники — что-то вроде стойки вентилятора с приспособлениями для кухонных работ. Пластика формы, да и окраска дополняют это впечатление. Хотя, заметим, формы пластически хорошо проработаны, композиции в целом пусть и не безгрешны, но интересны. В формах ПР, характерных для иного дизайнерского направления, проектировщики как бы любуются чистотой открытой и живой рациональной конструкции— кроме нее, ничего больше нет. Это прежде всего оригинальная в своем облике машина (рис. 106, в). Робот на рис. 106, г принципиально иной формы. «Рука» выпущена из некоего абстрактного объема, а каковы композиционные связи с ним — это кажется проектировщикам уже несущественным. Да и сам объем малоинтересен, безразличен к действию манипулятора и в пластике, и по цвету. Лучше в этом отношении ПР на рис. 106, д: основание цилиндрическое, и поскольку «рука» может вращаться на 360°, это создает какие-то внутренние композиционные связи. Хотя, думается, само основание и здесь больше напоминает что-то из предметов быта. Интересен ПР на рис. 106, е уже в самих пространственных преобразованиях сложной шарнирной системы. Это тот случай, когда нет никакой необходимости дополнительными средствами усиливать и без того возникающие ассоциации. Но здесь они естественны, так как отражают само непрерывное действие, сливающееся в единую визуальную форму,— нечто вроде многорукого бога Шивы. Простое лаконичное основание в данном случае выглядит более логично: здесь оно трактуется как стойка-пьедестал под пространственно-живую скульптуру. Робот на рис. 106, ж—опять-таки новая композиционная тема. И здесь рабочая часть и опора по формам и характеру действия не противоречат друг другу, а помогают выразить в форме образ машины. Примерно то же можно отнести и к ПР на рис. 106, з, но, думается, темно-синие полосы задают излишний налет рекламное™— этакий робот специально для каталога!.. Реклама:Читать далее:Обрабатывающие центры как новые объекты художественного конструированияСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|