|
|
Категория:
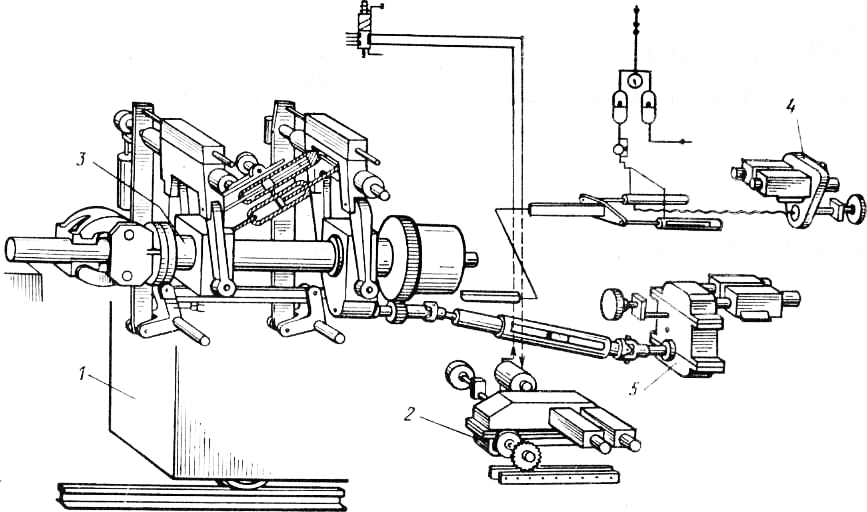
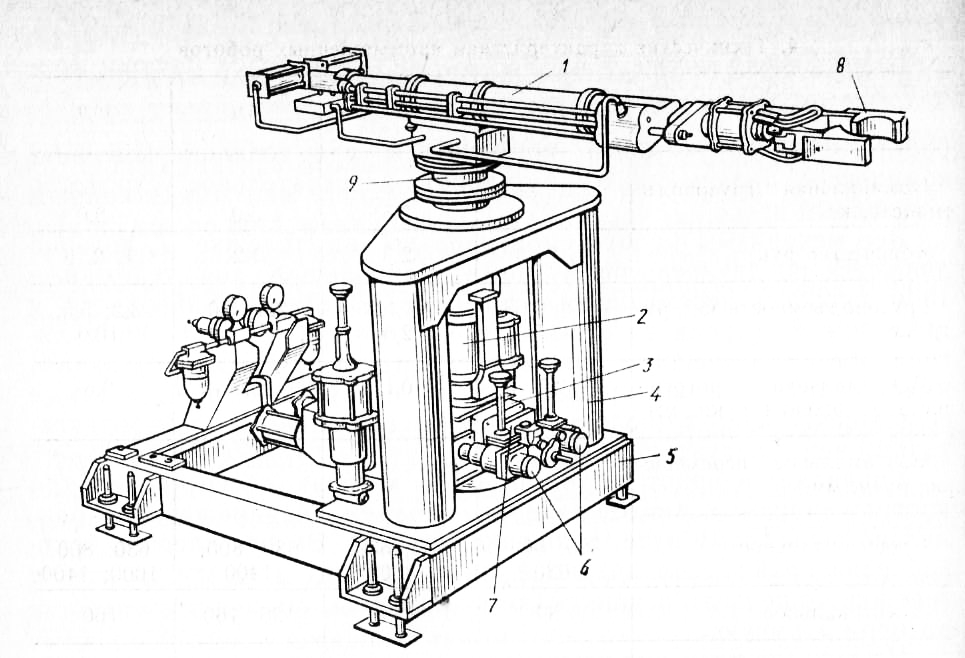
Кузнечные работы Поскольку кузнечно-штамповочное оборудование широко применяется в условиях серийного и массового производства, его автоматизация имеет важное значение как с точки зрения повышения производительности, так и с точки зрения улучшения условий труда. С этой целью в последние годы во всех странах мира широко развернулись работы по оснащению кузнечных машин промышленными роботами и созданию таким образом автоматизированных кузнечно-штамповочных комплексов. Промышленные роботы — это системы механизмов, которые способны успешно заменять человека при выполнении достаточно сложных повторяющихся движений. Обычно промышленным роботом называют снабженную захватом механическую руку, движения которой определяются системой программного управления. Созданные к настоящему времени промышленные роботы можно разделить на три основные группы. К первой группе относятся роботы, которые совершают движения по заранее заданным жестким программам. Каждая программа определяет свою последовательность работы (перемещения, захвата). Переход от одной программы к другой осуществляется автоматически или оператором, управляющим работой машины. Второй тип — так называемые адаптивные роботы. Они имеют возможность приспосабливаться к изменяющимся условиям работы. Такие роботы снабжаются чувствительными элементами — датчиками, которые позволяют фиксировать прикосновение к детали (осязать ее), оценивать величину давления, видеть деталь (искусственное зрение) и т. д. Адаптивные роботы, таким образом, могут распознавать детали, разыскивать и захватывать их, если они правильно расположены. Наиболее совершенны промышленные роботы третьего типа, они также снабжены большим количеством датчиков и способны самостоятельно анализировать сложившиеся условия и выполнять заданные им операции, если условия меняются в весьма широких пределах. В настоящее время в промышленности наиболее широко применяются роботы первого типа. На рис. 1 приведена кинематическая схема промышленного робота МКП-2,5, который применяется при создании ковочных комплексов, включающих кроме робота нагревательное устройство и ковочный пресс. Все механизмы робота смонтированы на тележке, которая движется по двухрельсовому пути. Наибольший ход тележки — 10 м, скорость перемещения — до 0,6 м/с. Тележка приводится в движение электродвигателем через редуктор. Рука манипулятора снабжена клещами для захвата заготовки. Механизм захвата имеет гидравлический привод. Подъем и опускание руки, а также ее вращение вокруг продольной оси осуществляются электродвигателями через редукторы. Управляется робот системой ЧПУ, которая обеспечивает три программируемых движения руки (подъем, перемещение параллельно рельсовому пути, вращение клещей). Зажим клещей, боковой сдвиг руки параллельно фронту пресса, а также движение тележки по рельсам осуществляется по командам, подаваемым оператором вручную. На рис. 2 показана компоновка механизмов типового промышленного робота с пневмоприводом. На основании расположена сварная рама, в нижней части которой размещен механизм поворота вокруг вертикальной оси, а выше него — механизм вертикального подъема руки с захватным устройством. Поворот вокруг вертикальной оси осуществляется двумя пневмоцилиндрами через цепную передачу. Гидравлические демпферы обеспечивают плавную остановку устройством колонны при окончании поворота. Подобные роботы выпускаются также с двумя и тремя руками.
Рис. 1. Принципиальная схема манипулятора МКП-2,5:
Рис. 2. Промышленный робот с пневмоприводом: Реклама:Читать далее:Роботизированные кузнечно-штамповочные комплексыСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|