|
|
Категория:
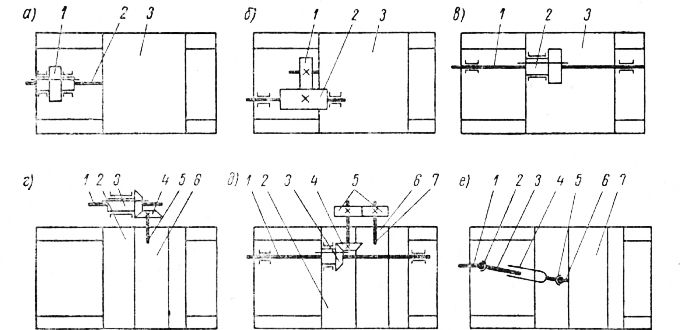
Металлорежущие станки Прямолинейно движущиеся рабочие органы. Формы передач к подвижным рабочим органам зависят от величины хода, характера перемещений и конструкции рабочего органа. При малой длине хода и однокоординатном перемещении используются варианты, представленные на рис. 1, а, б. В первом случае вал, передающий вращение механизмам подвижного рабочего органа, перемещается вместе с последним. Вал, имеющий длинный шпоночный паз или шлицевой конец, проходит через отверстие шестерни или шкива, сообщающих вращение механизмам подвижного рабочего органа. Подобная схема широко применяется для передачи вращения шпинделям сверлильных станков и фрезерных станков, смонтированным в подвижных гильзах. Во втором случае шестерня, перемещающаяся вместе с подвижным рабочим органом, скользит по длинной шестерне. При большой длине хода для передачи вращения используется ходовой вал, снабженный шпоночным пазом или шлицами. Шестерня, связанная с подвижным рабочим органом, скользит на шпонке или на шлицах вдоль ходового вала.
Рис. 1. Схемы передачи движения к подвижным рабочим органам. При двухкоордииатных перемещениях схема передачи вращения усложняется. Если вращение может быть непосредственно передано механизмам подвижных салазок, то передача движения от ходового вала к валу осуществляется с помощью конической передачи. При этом коническая шестерня связана с подвижным рабочим органом и при его перемещении скользит вдоль ходового вала. Если вращение должно быть передано механизмам нескольких взаимно перемещающихся салазок, то используется вариант, представленный на рис. 1, д. От ходового вала движение передается конической передаче 3—4, смонтированной в корпусе подвижных салазок. От валов, расположенных в корпусе, движение может быть передано соответствующим механизмам этого корпуса; к механизмам, расположенным в корпусе подвижных салазок, движение передается через шестерни и вал. При трехкоординатном перемещении движение последовательно передается от одних салазок к другим. При двух- и трехкоординатных перемещениях при сравнительно небольшой длине хода для передачи вращения может быть использован шарнирный телескопический вал. От вала вращение передается через универсальный шарнир валу со шпоночным пазом, который входит в отверстие трубчатого вала, связанного универсальным шарниром с валом подвижного рабочего органа. При наличии у подвижного рабочего органа поворотных салазок движение к механизмам поворотных салазок передается через конические шестерни, из которых первая связана с подвижными салазками. Ось конической шестерни должна совпадать с осью поворота поворотных салазок.
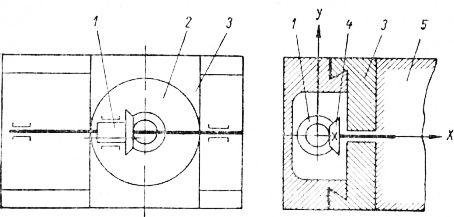
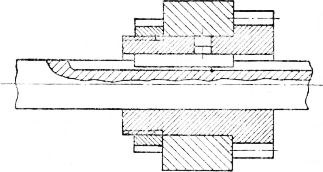
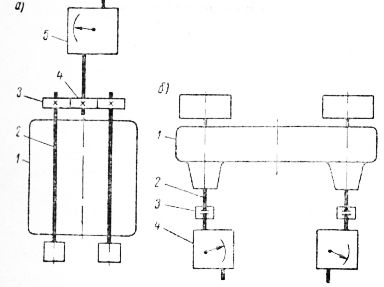
Рис. 2. Схемы передачи движения к поворотным рабочим органам. Следует заметить, что монтаж передач к подвижным рабочим органам является довольно трудоемкой операцией. Ось ходового вала и ось конической шестерни должны быть совмещены при сборке. Положение оси ходового вала определяется положением его опор относительно неподвижных направляющих, а положение оси конической шестерни — положением поддерживающего его кронштейна относительно направляющих подвижных салазок. Для обеспечения совмещения осей кронштейн конической шестерни целесообразно выполнять подвижным в направлении оси Y, а для компенсации отклонений в направлении оси X производить пригонку в процессе сборки или вводить компенсационные прокладки. Конструктивное оформление шестерни, скользящей по ходовому валу, представлено на рис. 3. Конструктивная сложность и трудности сборки передач устраняются при установке независимых двигателей на подвижных рабочих органах. Рабочие органы, смонтированные в поворотных барабанах и столах. В поворотных барабанах и столах монтируются шпиндели различных многопозиционных станков. Если при переходе шпинделя из позиции в позицию число оборотов шпинделя не меняется, то для передачи вращения шпинделям может быть использована схема, представленная на рис. 4, а. Все шпиндели, расположенные в периодически поворачивающемся барабане, получают вращение от центральной шестерни, ось которой совмещена с осью поворота барабана. С шестерней зацепляются шестерни, закрепленные на шпинделях. Число оборотов шпинделей в минуту настраивается механизмом.
Рис. 3. Конструктивное оформление скользящего элемента передачи к подвижному рабочему органу.
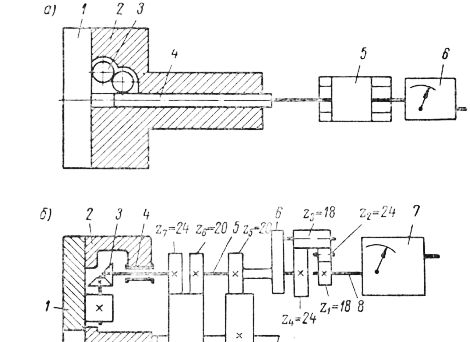
Рис. 4. Схемы передачи движения к рабочим органам, смонтированным в периодически поворачивающихся барабанах и столах. Если при переходе шпинделя из позиции в позицию его число оборотов в минуту меняется, то в каждой позиции шпиндель получает движение через отдельную кинематическую цепь с механизмом изменения чисел оборотов. При повороте стола шпиндели расцепляются с помощью муфт со своими приводами, а по окончании поворота вновь сцепляются. Первая схема применяется на большинстве горизонтальных многошпиндельных токарных автоматов и полуавтоматов, а вторая — на вертикальных многошпиндельных токарных полуавтоматах. Рабочие органы, смонтированные на вращающихся планшайбах. В ряде случаев подвижные рабочие органы располагаются на вращающихся планшайбах, во вращающихся барабанах и т. п. Например, радиальный суппорт должен перемещаться в радиальном направлении при вращении планшайбы. Простейшая схема механизма, позволяющего осуществить перемещение радиального суппорта представлена на рис. 4, а. Через полый шпиндель пропущена штанга, связанная с поступательно движущимися салазками, получающими движение от механизма изменения величины подачи. Штанга имеет на конце круговую зубчатую рейку, от которой движение передается через шестерни зубчатой рейке, связанной с радиальным суппортом. Вместо зубчатой рейки могут быть использованы различные рычажные или клиновые механизмы. При данной схеме затруднительно получить большую величину хода суппорта. Большой ход суппорта можно получить, используя схему, представленную на рис. 5, б. В корпусе планшайбы смонтирован червяк, зацепляющийся с червячной рейкой суппорта, и вал, получающий движение от механизма изменения величины подачи через шестерни z1~zi дифференциала, вал, шестерни z6—za—z7. Привод подачи может быть выполнен как независимым с индивидуальным электродвигателем, так и кинематически связанным с приводом вращения планшайбы. Поскольку подача суппорта измеряется в мм на оборот планшайбы, то при индивидуальном электродвигателе привод должен обеспечивать широкий диапазон изменения чисел оборотов.
Рис. 5. Схемы передачи движения к подвижным рабочим органам, смонтированным во вращающихся планшайбах. Реклама:Читать далее:Механизмы включения и выключенияСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|