|
|
Категория:
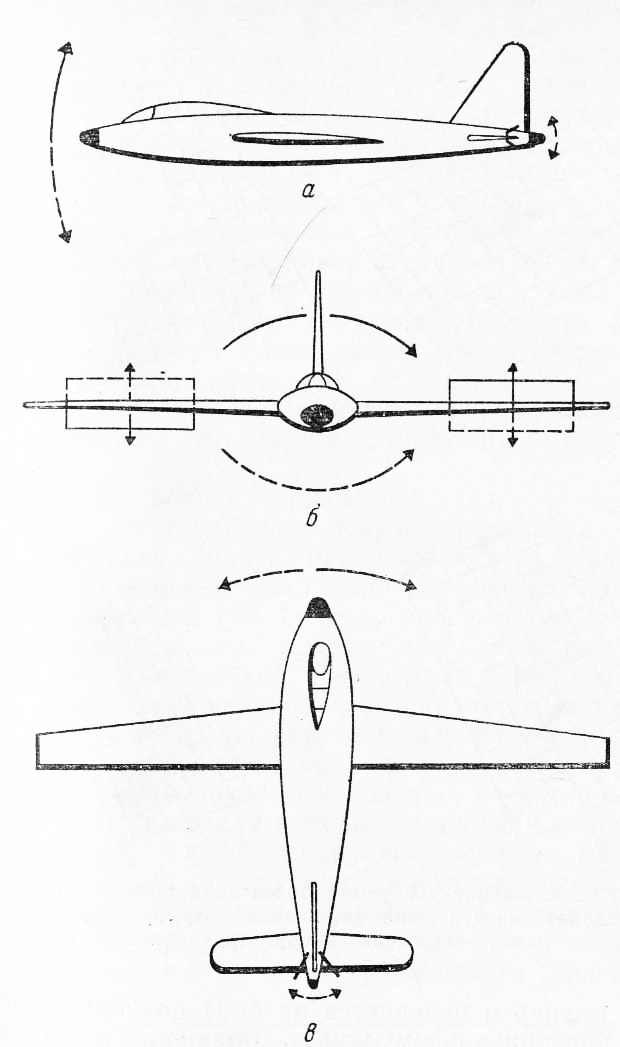
Роботы в промышленности Далее: Кинематика Рассмотрим подробнее три вращательных звена для ориентации рабочего органа робота под любым углом. Например, на планере пилот выполняет три операции в процессе управления: движение ручки управления вперед и назад для изменения угла поверхностей рулей высоты на хвосте; движение ручки управления из стороны в сторону для поворота поверхностей элеронов на задних краях крыльев и управление рулем с помощью ножных педалей. Перемещение ручки управления вперед переводит планер в носовое пикирование; назад — заставляет нос задираться. Это фактически управление движением относительно поперечной оси планера, заставляющее «колебаться» в том же направлении движения, в каком колеблется лодка в бурном .море ). Движение ручки управления из стороны в сторону заставляет вращаться весь планер вокруг оси фюзеляжа. Это управление вращением вокруг продольной оси. Наконец, нажатие на педали руля заставляет нос планера поворачиваться из стороны в сторону, благодаря чему планер поворачивается в горизонтальной плоскости и ложится на новый курс. Это движение известно как поиск. На практике возникают вторичные эффекты при данном управлении, которые позволяют планеру более эффективно, например, делать вираж, чем при использовании руля. Тем не менее пилот может поворачивать планер независимо в одном из трех взаимноперпендику-лярных направлений. Используя те же понятия относительно поворотов вокруг поперечной и продольной осей и понятие поиска, специалист по робототехнике может определить фактические углы каждого из трех типов вращения и ориентацию одной координатной системы относительно другой. Если относительные ориентации установлены, эти типы движения описываются углами Эйлера.
Рис. 1. Вращения вокруг поперечной и продольной осей, а также поиск применительно к планеру: о —вращение вокруг поперечной оси; б —вращение вокруг продольной оси; в — поиск
При определении углов Эйлера важной является последовательность вращений. Обратимся к примеру с планером. Вращение вокруг продольной оси на 90° по часовой стрелке, за которым следует задирание носа на 90° и поворот на правый борт, приведет к тому, что кУРс планера останется в горизонтальной плоскости (хотя планер и повернется на бок) под прямыми углами к первоначальному курсу. Вращение на 90° вокруг поперечной оси, за которым следует вращение на 90° вокруг продольной оси, создаст направление к звездам. Последовательность углов Эйлера рассматривается как вращения «вокруг продольной оси — поперечной оси — поиск». Используя углы Эйлера, можно построить матрицу вращения 3×3 для включения в однородную матрицу преобразования.
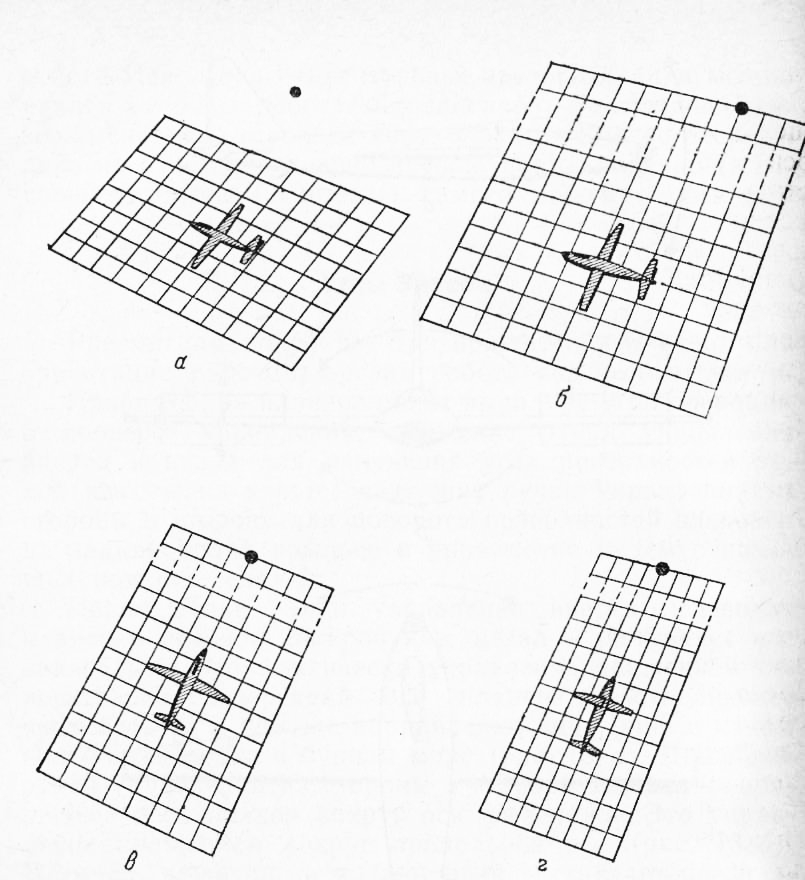
Рис. 2. Достижение требуемой ориентации посредством вращений в последовательности типа «вращение вокруг продольной оси — поиск — вращение вокруг продольной оси»
В действительности нет единой точки зрения относительно того, к каким углам относятся углы Эйлера. Представьте, что планер (рис. 2,а) переделан для полета в космосе, тогда легко заметить, что новый подход позволяет самолету принять любую выбранную ориентацию (например, прямо к выбранной звезде). Планер может вначале вращаться вокруг продольной оси, пока плоскость крыльев и фюзеляжа не пересечет нужную звезду (рис. 2,б). Самолет затем может рыскать, совершая движение поиска, пока нос не укажет на звезду (рис. 2, в). Наконец, дальнейшее вращение может выверить крылья к любой требуемой плоскости (рис. 2, г). «Вращение вокруг продольной оси — поперечной оси — поиск» и «вращение вокруг продольной оси — поиск — вращение вокруг продольной оси» являются адекватными методами достижения требуемой ориентации. Следовательно, оба подхода можно применять для составления однородных матриц преобразования. При рассмотрении фактической конструкции запястья робота создать три сочленения под взаимно прямыми углами, как требовалось бы для случая вращения «вокруг продольной оси — поперечной оси — поиск», часто труднее, чем применить вращающееся запястье, на котором прикреплено устройство для поиска и вращения вокруг продольной оси типа дифференциально-зубчатого механизма. В конструкциях, в которых две узловые оси выровнены относительно друг друга, вращение вокруг одной из них приводит к идентичному движению рабочего органа, в этом случае рука робота теряет одну степень свободы. Реклама:Читать далее:КинематикаСтатьи по теме:Главная → Справочник → Статьи → Блог → Форум |
|
|
|
|
Контакты: Сергей Королёв © 2007-2009 Pereosnastka.ru - информационный сайт о металло- и деревообработке. |
© Все права защищены.
Копирование материалов невозможно. |
|